Способы улучшения коэффициента мощности асинхронного двигателя
Абдуллаев Хумоюн Фуркатович 1 , Абдуллаев Мухаммадсайфулло 1
1 Андижанский машиностроительный институт
Аннотация
В данной статье обсуждается разработка улучшения коэффициента мощности асинхронного двигателя с использованием естественных и искусственных способов. Индуктивные нагрузки всегда создают низкий коэффициент мощности из-за потребления большей реактивной мощности. Низкий коэффициент мощности не только является штрафом для потребителей, но и приводит к потерям энергии в электрических системах. Когда коэффициент мощности повышается, автоматически экономится энергия. Коэффициент мощности — это цель любой электроэнергетической компании, поскольку, если коэффициент мощности меньше единицы, они должны подавать больший ток пользователю для заданного количества потребляемой мощности.
Библиографическая ссылка на статью:
Абдуллаев Х.Ф., Абдуллаев М. Повышение коэффициента мощности асинхронного двигателя // Современные научные исследования и инновации. 2021. № 7 [Электронный ресурс]. URL: https://web.snauka.ru/issues/2021/07/96390 (дата обращения: 31.03.2024).
Асинхронные двигатели представляют для линии электропередач отстающий (индуктивный) коэффициент мощности. Коэффициент мощности больших полностью нагруженных высокоскоростных двигателей может достигать 90% для больших высокоскоростных двигателей. При 3/4 полной нагрузки максимальный коэффициент мощности высокоскоростного двигателя может составлять 92%. Коэффициент мощности малых тихоходных двигателей может составлять всего 50%. При запуске коэффициент мощности может находиться в диапазоне от 10% до 25%, увеличиваясь по мере достижения ротором скорости. Коэффициент мощности (PF) значительно зависит от механической нагрузки двигателя (рисунок ниже). Ненагруженный двигатель аналогичен трансформатору без резистивной нагрузки на вторичной обмотке. Небольшое сопротивление отражается от вторичной обмотки (ротора) к первичной обмотке (статору). Таким образом, в линии электропередачи присутствует реактивная нагрузка до 10% коэффициента мощности. Когда ротор нагружен, возрастающая резистивная составляющая отражается от ротора к статору, увеличивая коэффициент мощности [1].
Большие трехфазные двигатели более эффективны, чем трехфазные двигатели меньшего размера, и почти все однофазные двигатели. КПД большого асинхронного двигателя может достигать 95% при полной нагрузке, хотя чаще встречается 90%. Эффективность малонагруженного или ненагруженного асинхронного двигателя низкая, потому что большая часть тока связана с поддержанием намагничивающего потока. Когда нагрузка крутящего момента увеличивается, больше тока потребляется для создания крутящего момента, в то время как ток, связанный с намагничиванием, остается фиксированным. Эффективность при 75% FLT может быть немного выше, чем при 100% FLT. Эффективность снижается на несколько процентов при FLT 50% и снижается еще на несколько процентов при FLT 25%. Эффективность становится низкой только ниже 25% FLT. Изменение КПД в зависимости от нагрузки показано на рисунке выше. Индукционные двигатели обычно имеют завышенные размеры, чтобы гарантировать, что их механическая нагрузка может быть запущена и приведена в действие при любых условиях эксплуатации. Если многофазный двигатель нагружен менее 75% номинального крутящего момента, когда КПД достигает пика, КПД снижается лишь незначительно до 25% FLT[2].
Батарею конденсаторов следует подключать непосредственно к клеммам двигателя.
После применения компенсации к двигателю ток в комбинации двигатель-конденсатор будет ниже, чем раньше, при тех же условиях нагрузки с приводом от двигателя. Это связано с тем, что значительная часть реактивной составляющей тока двигателя поступает от конденсатора, как показано на рисунке 1 .
Если устройства максимальной токовой защиты двигателя расположены перед подключением конденсатора двигателя (а это всегда будет иметь место для конденсаторов, подключенных к клеммам), уставки реле максимального тока должны быть уменьшены в соотношении для двигателей, компенсированных в соответствии со значениями квар, указанными на рисунке 1. (максимальные значения, рекомендуемые для предотвращения самовозбуждения стандартных асинхронных двигателей, как описано в разделе «Как избежать самовозбуждения асинхронного двигателя»), вышеупомянутое соотношение будет имеют значение, аналогичное значению, указанному для соответствующей скорости двигателя на Рисунке 1.



Рис. 1 — Перед компенсацией трансформатор выдает всю реактивную мощность; после компенсации конденсатор обеспечивает большую часть реактивной мощности
Основная цель этого исследования – разработать схему энергосбережения для промышленной распределительной сети. Это может быть достигнуто за счет уменьшения потерь в сети и улучшения работы основной электрической нагрузки до более высокого уровня эффективности. Разработанная схема направлена на повышение коэффициента мощности распределительной сети за счет добавления в сеть шунтирующих конденсаторов оптимального размера и расположения. В промышленных распределительных сетях наблюдается рост потерь мощности, а увеличение типа нагрузки сопровождается низким коэффициентом мощности, что приводит к огромной передаче реактивной мощности от энергосистемы через сеть [3].
Главный недостаток этой проблемы – увеличение потерь в сети и снижение уровня напряжения. Это может привести к снижению надежности, проблемам с безопасностью и более высоким затратам на электроэнергию. Чем ниже наш коэффициент мощности, тем менее экономично работает наша система. Фактическое количество мощности, используемой или рассеиваемой в цепи, называется истинной мощностью. Реактивные нагрузки, такие как катушки индуктивности и конденсаторы, составляют так называемую реактивную мощность. Линейная комбинация истинной мощности и реактивной мощности называется полной мощностью. Нагрузки энергосистемы состоят из резистивных, индуктивных и емкостных нагрузок.
В цепях переменного тока обычно существует разность фаз между напряжением и током. Этот термин известен как коэффициент мощности схемы. Если цепь индуктивна, ток отстает от напряжения, а коэффициент мощности называется отставшим коэффициентом мощности, а если цепь емкостная, то ток приводит к напряжению, а коэффициент мощности считается ведущим коэффициентом мощности. Средняя мощность в цепи переменного тока выражается через среднеквадратичное значение тока и напряжения [4].
Средняя мощность в цепи переменного тока выражается через среднеквадратичное значение тока и напряжения.
Чисто резистивная нагрузка (лампы накаливания, электрические нагревательные элементы) будет иметь коэффициент мощности 1,0 (единица).

Рис. 2. Треугольник коэффициента мощности по мощности
Коэффициент мощности асинхронных двигателей – один из важных элементов, который необходимо поддерживать равным единице. Коэффициент мощности изменяется, когда нагрузка двигателя изменяется с холостого хода на полную / перегрузку. Это изменение вызвало мониторинг и определение низкого коэффициента мощности при любых условиях нагрузки становится важным из-за поиска оптимальной реактивной мощности для компенсации коэффициента мощности.
- Fuchs EF (2008) Качество электроэнергии в энергосистемах и электрических машинах. Academic Press, Кембридж
- Chapman S (2004) Основы электрического машиностроения. McGraw -Hill Education, Нью-Йорк.
- Orsag P (2014) Влияние качества электросети на рабочие характеристики асинхронного двигателя. В: 14-я международная конференция по окружающей среде и электротехнике (EEEIC), 10–12 мая 2014 г., Острава, Чешская Республика.
- Захир Дж. (2009) Оценка коэффициента мощности путем анализа данных о качестве электроэнергии для несимметрии напряжения . В: ICEE, Мелборн
- Кумар С.П. , Саббервал С.П., Мухарджи А.К. (1994) Методы измерения и коррекции коэффициента мощности. Electric Power Syst Res 32: 141–143
- М. Ходапанах1 · А.Ф. Зобаа1 · М. Аббод. Оценка коэффициента мощности асинхронных двигателей при любых условиях нагрузки с использованием опорной векторной регрессии (SVR).
- Студент M.Tech , * 2 доц. Профессор и электроцеха и UIET, Курукшетра Universtiy Power Factor Улучшение асинхронного двигателя с помощью конденсаторов
© Если вы обнаружили нарушение авторских или смежных прав, пожалуйста, незамедлительно сообщите нам об этом по электронной почте или через форму обратной связи.
Коэффициент мощности
Постараемся дать простое объяснение того, что такое коэффициент мощности, и ответить на наиболее часто встречающиеся вопросы:
1) что такое коэффициент мощности?
2) каковы причины низкого коэффициента мощности?
3) почему следует повышать коэффициент мощности?
4) каким образом можно скорректировать (повысить) коэффициент мощности?
5) когда окупаются инвестиции в коррекцию коэффициента мощности?
6) что делать дальше?
Что такое коэффициент мощности?
Чтобы лучше уяснить, что такое коэффициент мощности, нужно начать с нескольких основных понятий:
Активная мощность (кВт), также называемая полезной мощностью или действующей мощностью. Это мощность, которая реально приводит в действие оборудование и выполняет полезную работу.
Реактивная мощность (квар). Это мощность, необходимая устройствам, принцип действия которых основан на использовании электромагнитного поля (трансформаторов, электродвигателей, реле) для вырабатывания магнитного потока.
Полная мощность (кВА). Это векторная сумма активной и реактивной мощностей.
Рассмотрим простую аналогию, чтобы лучше уяснить эти понятия.
Допустим, вы находитесь на стадионе в жаркий день и заказываете кружку своего любимого пива. Та часть вашей порции, которая утоляет жажду, представляет активную мощность (рис. 1).
Увы, жизнь несовершенна. Вместе с этим вы получаете и пену. И давайте посмотрим правде в глаза – пена нисколько не утоляет жажду. Эта пена представляет реактивную мощность. Общее содержимое кружки является суммой активной мощности (пива), кВт, и реактивной мощности (пены), квар.

Теперь, после того как мы разобрались с основными понятиями, можно перейти к коэффициенту мощности.
Коэффициент мощности (КМ) – это отношение активной мощности к полной мощности:
КМ = кВт/(кВт + квар)
Если вернуться к нашей аналогии с кружкой пива, коэффициент мощности представляет собой отношение количества пива (кВт) к общему содержимому кружки, то есть к количеству пива с пеной (кВА).
КМ = кВт/(кВт + квар) = пиво/(пиво + пена)
Таким образом, при данной полной мощности:
· чем больше пены (чем выше процент реактивной мощности), тем меньше отношение активной мощности (пиво) к полной мощности (пиво с пеной) и тем меньше коэффициент мощности;
· чем меньше пены (чем ниже процент реактивной мощности), тем выше отношение активной мощности (пиво) к полной мощности (пиво с пеной). Если пена (реактивная мощность) приближается к нулю, коэффициент мощности приближается к единице.
Наша аналогия с пивной кружкой немного упрощена. В реальности необходимо определять векторную сумму реактивной и активной мощностей. Поэтому следующим шагом будет рассмотрение угла между этими векторами.
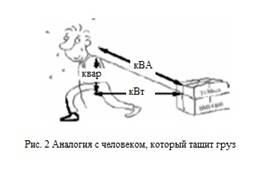
Рассмотрим другую аналогию.
Человек тянет тяжёлый груз (рис. 2). Мощность, которую он прикладывает в прямом направлении, то есть в том направлении, куда он хочет доставить груз, — это активная мощность (кВт).
К сожалению, человек не может тянуть груз строго горизонтально (он получит сильные боли в спине), поэтому высота его плеч добавляет некоторое количество реактивной мощности (квар).
Полная мощность, прикладываемая человеком (кВА), – это векторная сумма реактивной и активной мощностей.
Соотношение между активной, реактивной и полной мощностями, а также определение коэффициента мощности иллюстрируются треугольником мощностей, изображённым на рис. 3.
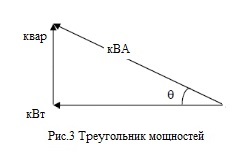
КМ = кВт/кВА = cosθ

кВА = кВт 2 + квар 2 = V х I х.
Заметим, что в мире нашей мечты по аналогии с кружкой пива:
- реактивная мощность должна быть очень мала (количество пены стремится к нулю);
- активная мощность и полная мощность должны быть почти равны друг другу
(больше пива, меньше пены).
Аналогично в идеальном мире по аналогии с человеком, который тащит груз:
- реактивная мощность очень мала (стремится к нулю);
- активная мощность и полная мощность почти равны друг другу (человеку не нужно
- тратить энергию на усилие, направленное вдоль его тела);
- угол θ между векторами активной и полной мощности стремится к нулю;
- cosθ стремится к единице;
- коэффициент мощности стремится к единице.
Поэтому чтобы иметь эффективную систему (будь то кружка пива или человек, который тащит тяжёлый груз), мы должны иметь коэффициент мощности, как можно более близкий к 1,0.
Однако бывает, что система распределения электроэнергии имеет коэффициент мощности гораздо меньше 1,0. Далее мы увидим, к чему это приводит.
Каковы причины низкого коэффициента мощности?
Так как коэффициент мощности является отношением активной мощности к полной мощности, легко понять, что к низкому коэффициенту мощности приводит ситуация, когда активная мощность невелика по сравнению с полной мощностью. Вспоминая нашу аналогию с пивной кружкой, можем сказать, что это бывает, когда уровень реактивной мощности (пены, плеч работника) велик.
Что приводит к большой величине реактивной мощности?
Индуктивные нагрузки, которые являются причиной возникновения реактивной мощности, включают в себя:
- трансформаторы,
- асинхронные электродвигатели,
- асинхронные генераторы (ветряные электрогенераторы),
- системы освещения на разрядных лампах высокой интенсивности.
Такие индуктивные нагрузки потребляют основную часть мощности в производственных комплексах.
Реактивная мощность (квар), необходимая реактивным нагрузкам, увеличивает количество полной мощности (кВА) в системе распределения энергии (рис. 4). Это увеличение реактивной и полной мощности приводит к увеличению угла θ между активной и полной мощностью. Напомним, что cosθ (или коэффициент мощности) приувеличении θ уменьшается.
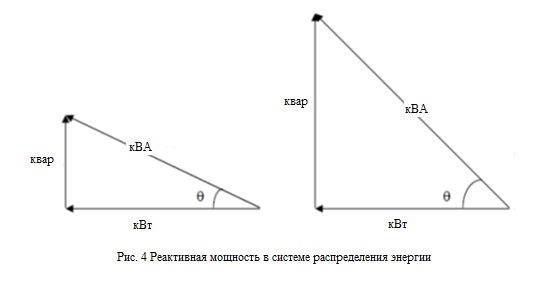
Таким образом, причиной низкого коэффициента мощности являются индуктивные нагрузки с большой реактивной мощностью.
Почему следует повышать коэффициент мощности?
Есть несколько причин для увеличения коэффициента мощности. Вот некоторые преимущества, которые можно получить при улучшении коэффициента мощности.
1.Снижение платы поставщику электроэнергиив связи со следующими факторами:
a) Уменьшение величины максимальной мощности, предъявляемой к оплате.
Напомним, что причиной низкого коэффициента мощности являются индуктивные нагрузки, которым нужна реактивная мощность. Увеличение реактивной мощности приводит к увеличению полной мощности, потребляемой от поставщика электроэнергии.
Таким образом, низкий коэффициент мощности предприятия вынуждает поставщика увеличивать мощность генерации и пропускную способность линии, чтобы справиться с дополнительным потреблением.
При увеличении коэффициента мощности используется меньше реактивной мощности. Это приводит к уменьшению активной мощности, то есть к снижению платы поставщику.
б) Исключение штрафа за коэффициент мощности.
Поставщики электроэнергии обычно выставляют дополнительный счёт потребителям, если их коэффициент мощности меньше 0,95 (если коэффициент мощности потребителя падает ниже 0,85, некоторые поставщики не гарантируют энергоснабжение). Таким образом, при увеличении коэффициента мощности можно избежать повышенных расходов на электроэнергию.
2.Увеличение пропускной способности системы энергоснабжения и уменьшение потерь электроэнергии
При добавлении в систему конденсаторов (являющихся источниками реактивной мощности) увеличивается коэффициент мощности и улучшается пропускная способность системы для активной мощности.
К примеру, трансформатор 1000 кВА с коэффициентом мощности 80% выдаёт мощность 800 кВт (600 квар):

1000 кВА =
Отсюда реактивная мощность – 600 квар.
При увеличении коэффициента мощности до 90% можно получить более высокую активную мощность при той же величине полной мощности:

1000 кВА =
Отсюда реактивная мощность – 436 квар.
Активная мощность системы увеличивается до 900 кВт, при этом потребляемая от поставщика реактивная мощность составляет только 436 квар.
Нескорректированный коэффициент мощности приводит к потерям мощности системы распределения электроэнергии. При увеличении коэффициента мощности эти потери уменьшаются. В связи с продолжающимся ростом стоимости энергии повышение энергоэффективности предприятия имеет очень большое значение. При уменьшении потерь в системе появляется возможность подключения к ней дополнительной нагрузки.
3. Увеличение уровня напряжения в энергосистеме, уменьшение нагрева и более эффективная работа электродвигателей
Как уже говорилось, нескорректированный коэффициент мощности приводит к потерям мощности в системе распределения электроэнергии. При этом может снижаться уровень напряжения. Чрезмерное падение напряжения может стать причиной перегрева и преждевременного выхода из строя электродвигателей и других индуктивных устройств.
Поэтому при увеличении коэффициента мощности падение напряжения на фидерных кабелях и связанные с этим проблемы минимизируются. Двигатели будут меньше нагреваться и работать более эффективно, также несколько увеличатся их мощность и пусковой момент.
Как можно скорректировать (улучшить) коэффициент мощности?
Как упоминалось выше, источники реактивной мощности (индуктивные нагрузки) уменьшают коэффициент мощности. К таким нагрузкам относятся:
- трансформаторы
- асинхронные электродвигатели
- асинхронные генераторы (ветряные электрогенераторы)
- системы освещения на разрядных лампах высокой интенсивности.
Соответственно, потребители реактивной мощности увеличивают коэффициент мощности. К ним относятся:
- конденсаторы
- синхронные генераторы (энергоснабжения и аварийные)
- синхронные двигатели.
Поэтому нет ничего удивительного, что одним из методов увеличения коэффициента мощности является установка в систему конденсаторов. Этот и другие способы увеличения коэффициента мощности рассматриваются далее.
1. Установка конденсаторов (генераторов реактивной мощности).
При установке конденсаторов уменьшается величина реактивной мощности (пены из нашего примера), при этом увеличивается коэффициент мощности. На рис. 5 показан принцип действия этого метода.
Реактивная мощность (квар) индуктивных нагрузок всегда имеет сдвиг на 90º относительно активной мощности (кВт).
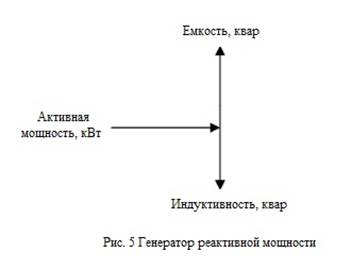
Индуктивность и ёмкость действуют со сдвигом на 180º относительно друг друга. Конденсаторы запасают реактивную энергию и затем её отдают со знаком, противоположным знаку реактивной энергии индуктивности. Наличие в цепи конденсатора и индуктивности приводит к постоянному поочерёдному перетеканию энергиимежду ними.
Поэтому, если схема сбалансирована, вся энергия, отдаваемая индуктивностью, поглощается конденсатором. Ниже приводится пример того, как конденсатор уменьшает влияние индуктивной нагрузки.
2. Минимизация работы двигателей на холостом ходу или с малой нагрузкой.
Мы уже говорили о том, что причиной низкого коэффициента мощности является наличие асинхронных двигателей. Но если говорить более конкретно, к низкому коэффициенту мощности приводит работа асинхронных двигателей с малой нагрузкой.
3. Недопущение работы оборудования при напряжении, превышающем его номинальное напряжение.
4. Замена стандартных двигателей по мере их выхода из строя на двигатели с повышенным кпд.
Даже у двигателей с повышенным кпд нагрузка сильно влияет на коэффициент мощности. Поэтому для реализации заложенного в его конструкцию высокого коэффициента мощности двигатель должен работать с нагрузкой, близкой к номинальной.
Когда окупаются инвестиции в коррекцию коэффициента мощности?
При установке конденсаторов на предприятии можно улучшить коэффициент мощности. Но установка конденсаторов стоит денег. Возникает вопрос: когда снижение платежей за электроэнергию окупит стоимость конденсаторов?
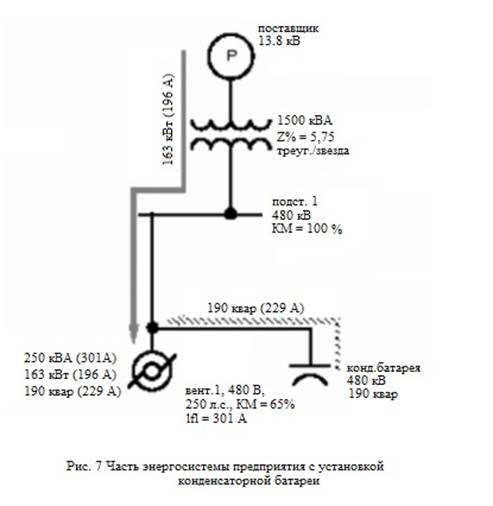
Можно провести расчёт окупаемости. В качестве примера рассмотрим часть энергосистемы предприятия, показанную на рис. 6. Коэффициент мощности составляет 0,65.
- нагрузка – 163 кВт;
- время работы — 730 часов в месяц;
- 480 В, 3 фазы;
- потери в системе — 5%;
- коэффициент мощности — 65%;
прейскурант тарифов на электроэнергию:
- тариф на электроэнергию — $4,08/кВт·ч;
- плата за мощность — $2,16/кВт;
- штраф за реактивную мощность — $0,15/квар.

Мы можем рассчитать общую величину ежемесячной платы за электроэнергию следующим образом.
Сначала рассчитаем плату за потреблённую энергию:
163 кВт х 730 ч/мес. х $4,08/кВт·ч = $4854,79/мес.
Затем определяем плату за мощность:
163 кВт х $2,16/кВт = $352,08/мес.
И, наконец, определяем штраф за реактивную мощность:
190 квар х 730 ч/мес. х $0,15/квар·ч = $208/мес.
Теперь предположим, что в систему установлена конденсаторная батарея (рис. 7). 190 квар конденсатора компенсируют 190 квар асинхронного двигателя икоэффициент мощности становится равным 1,0.
Параметры системы с конденсаторами:
- скорректированный КМ = 1,0
Можно рассчитать снижение потерь:
снижение потерь = 1- (0,65 2 / 1,00 2 ) = 0,58
Поэтому снижение потерь в системе составит:
снижение потерь в системе = 0,58 х 0,05 (потери) = 0,029
Уменьшение общей активной нагрузки составит:
163 кВт х 0,029 = 4,7 кВт
Теперь можно рассчитать экономию при оплате за потреблённую энергию:
4,7 кВт х 730 ч/мес. х $4,08/кВт·ч = $141,00/мес
Затем определяем экономию на плате за мощность:
4,7 кВт х $2,16/кВт = $10,15/мес
И, наконец, напомним, что штраф за реактивную мощность равен нулю.
Теперь определим срок окупаемости конденсаторной батареи.
- Стоимость конденсатора — $30,00/квар.
Месячная экономия составляет:
$ 141,00 – стоимость потреблённой энергии
$ 10,15 – плата за мощность
$ 208,00 – штраф за реактивную мощность
Время окупаемости затрат составляет:
$30,00/квар х 190 квар/$359/мес. = 16 мес.
Установка конденсаторов окупится через 16 месяцев.
Что делать дальше?
Нужно посмотреть какой коэффициент мощности на предприятии и что можно сделать, чтобы его улучшить.
«Хомов электро» может помочь в определении оптимального способа коррекции коэффициента мощности для вашего предприятия. Мы также можем помочь выбрать место установки и тип конденсаторов, устанавливаемых в системе энергоснабжения.
Вы всегда можете позвонить нам или отправить сообщение по факсу или электронной почте, а также обратиться через наш веб-сайт.
Мы всегда рады обсудить проблемы, связанные с конкретными условиями работы вашего предприятия.
Как повысить КПД электродвигателя: выбираем решение
Несмотря на высокую эффективность современных электромеханических преобразователей, в процессе их работы все же возникают потери магнитной, электрической и механической энергии, сопровождающиеся выделением тепла, усилением шума и вибрации. Это обусловлено трением элементов, перемагничиванием в магнитном поле сердечника якоря электродвигателя, скачками нагрузок… Можно ли минимизировать эти «утечки», повысив тем самым КПД, и если да, то как этого добиться? Об этом мы и поговорим в данной статье.
Современные подходы к повышению КПД асинхронных двигателей
Согласно общепринятой классификации электрические машины бывают синхронными — с одинаковой частотой вращения ротора и магнитного поля, и асинхронными — в которых магнитное поле вращается с более высокой скоростью, чем ротор. Электродвигатели последнего типа получили более широкое распространение: порядка 90% всех двигателей на планете являются асинхронными. Они применяются во всех отраслях промышленности, сельского хозяйства и сферы ЖКХ. Такая популярность объясняется тем, что данные механизмы просты в изготовлении, надежны, доступны по цене и не требуют больших эксплуатационных затрат. Кроме того, КПД асинхронного электродвигателя значительно выше, чем синхронного.
Но есть у подобной техники и существенные недостатки. В частности, высокий пусковой ток, недостаточный пусковой момент, несогласованность механического момента на валу привода с механической нагрузкой (что приводит к лавинообразному росту силы тока и избыточным механическим нагрузкам при запуске и снижению КПД в периоды пониженной нагрузки), невозможность точной регулировки скорости работы прибора и т.д. Все эти факторы приводят к тому, что эффективность работы механизма существенно снижается.
На заметку
Ключевыми факторами, влияющими на КПД электродвигателя, являются степень его загрузки по отношению к номинальной, конструкция, модель, степень износа, отклонение напряжения в сети от номинального. Также КПД электродвигателя может заметно снизиться после его перемотки.
Для повышения эффективности работы электропривода необходимо обеспечивать его загрузку на уровне не менее 75%, увеличивать коэффициент мощности, регулировать напряжение и где возможно — частоту подаваемого тока. Реализация этих мер обеспечивается использованием специального оборудования, позволяющего повысить КПД электродвигателя. Однако не во всех случаях возможно или необходимо реализовать их все.
Такие приборы подразделяются на частотные преобразователи, которые изменяют скорость вращения двигателя путем изменения частоты питающего напряжения, а также устройства плавного пуска, ограничивающее скорость нарастания пускового тока и его максимальное значение. В этой статье мы сравним современные решения для повышения КПД двигателей с позиций эффективности работы и экономической целесообразности.
Частотные преобразователи для асинхронных двигателей
Одним из наиболее действенных средств повышения эффективности работы электродвигателя является частотный преобразователь, который трансформирует однофазное или трехфазное напряжение с частотой 50 Гц в напряжение с требуемой частотой (обычно от 1 Гц до 300–400 Гц, но иногда и до 3000 Гц) и амплитудой.
Принцип работы преобразователя частоты
«Частотник» (так в профессиональной среде называют преобразователь частоты) состоит из:
- Микропроцессора, обеспечивающего управление электронными ключами, а также контроль работы оборудования, его диагностику и защиту.
- Схем, функционирующих в режиме ключей и открывающих тиристоры или транзисторы. Несколько более эффективными считаются тиристорные преобразователи частоты, так как они могут работать с высокими напряжениями и токами и имеют КПД до 98%. Однако при не слишком больших мощностях это преимущество практически незаметно.
Существует два класса приборов в зависимости от устройства и принципов работы:
- С непосредственной связью.Такие преобразователи представляют собой выпрямители. Система осуществляет отпирание тиристоров и подключение обмотки к сети, в результате чего образуется выходное напряжение с частотой 0–30 Гц и ограниченным диапазоном управления скоростью вращения привода. Такие устройства не могут использоваться при оснащении мощного оборудования, регулирующего множество технологических параметров.
- С промежуточным звеном постоянного тока.В подобных аппаратах производится двойное преобразование энергии: входное напряжение выпрямляется, затем фильтруется и сглаживается, а потом при помощи инвертора снова трансформируется в напряжение с необходимой амплитудой и частотой. Подобное преобразование может несколько снижать КПД оборудования, но такие преобразователи частоты имеют широкое применение в силу того, что могут давать на выходе напряжение с высокой частотой.
Наибольшую популярность получили устройства второго типа, обеспечивающие плавную регулировку оборотов двигателей.
Возможности частотных преобразователей
Эффективность того или иного преобразователя во многом зависит от соответствия его функциональных возможностей целям использования. Так, для оснащения электроприводов насосов и вентиляторов используются преобразователи с невысокой перегрузочной способностью и зачастую с U/f-управлением, которые при необходимости могут повышать начальное значение выходного напряжения с целью увеличения момента двигателя на низких частотах.
Более совершенными являются устройства с векторным управлением, которые регулируют не только частоту и амплитуду выходного напряжения, но и фазы тока, протекающего через обмотки статора. Они устанавливаются на прокатные станы, конвейеры, подъемное, упаковочное оборудование и др.
Если необходимо выполнять контролируемое торможение двигателя, используется функция замедления, которая обеспечивают остановку механизма за счет изменения частоты до нужного уровня. Однако, если требуется интенсивное замедление, может понадобиться «частотник», оснащенный встроенными или внешними блоком торможения и тормозным резистором либо рекуперативным блоком торможения. В режиме динамического торможения двигатель переходит в генераторный режим и трансформирует механическую энергию в электрическую, которая возвращается в звено постоянного тока и либо рассеивается в виде тепла на сопротивлении тормозного резистора, либо возвращает энергию в сеть посредством рекуперации. Это решение актуально для станкового и конвейерного оборудования.
Частотный преобразователь с обратной связью позволяет поддерживать постоянную скорость вращения при переменной нагрузке с более высокой точностью, чем преобразователь без обратной связи, тем самым повышая качество технологического процесса в замкнутых системах. Такие устройства используются в робототехнике, дерево- и металлообработке, в системах высокоточного позиционирования.
Стоимость
В последнее время стоимость «частотников», как бы выразились финансисты, подвержена высокой волатильности: за год–полтора цены значительно увеличились, что объясняется, помимо прочего, колебаниями валютного курса. Так, частотные преобразователи российского и зарубежного производства мощностью 90 кВт в 2021 году обходились покупателям примерно в 200–700 тысяч рублей.
Достоинства и недостатки
Таким образом, преобразователь частоты для асинхронного двигателя, принцип работы которого описан выше, обеспечивает снижение расхода электроэнергии, плавный запуск привода и высокую точность регулировки, увеличивает пусковой момент и стабилизирует скорость вращения при переменной нагрузке. Все это в совокупности позволяет повысить коэффициент полезного действия машины. К недостаткам «частотника» можно отнести его высокую стоимость, а также создание электромагнитных помех в процессе работы.
Устройства плавного пуска: контроллеры-оптимизаторы
Для обеспечения плавного запуска, разгона и остановки электродвигателя используются устройства плавного пуска (УПП). Эти приборы ограничивают скорость увеличения пускового тока в течение определенного времени.
Традиционные устройства плавного пуска не решают задачу повышения КПД. Кроме того, они могут применяться только для управления приводами с небольшой нагрузкой на валу. Однако сегодня существуют разновидности УПП, позволяющие повысить энергоэффективность двигателей путем согласования крутящего момента с моментом нагрузки и, как следствие, снижения потребления электроэнергии на минимальных нагрузках на 30–40% — это контроллеры-оптимизаторы. Последние предназначены для приводов, не нуждающихся в изменении числа оборотов двигателя.
Например, чтобы снизить энергопотребление эскалатора при помощи преобразователя частоты, потребовалось бы уменьшить его скорость, но это невозможно, потому что тогда подъем пассажиров потребует более продолжительного времени. А контроллеры-оптимизаторы позволяют снизить энергопотребление без изменения скорости электропривода в тех случаях, когда он недогружен.
Принцип работы
Контроллеры-оптимизаторы — это регуляторы напряжения питания электродвигателя, осуществляющие контроль за фазами тока и напряжения. Они обеспечивают полное управление приводом на всех этапах работы и защищают его от повышенного и пониженного напряжения, перегрузки, обрыва или нарушения чередования фаз и т.д. Контроллеры-оптимизаторы согласуют значение крутящего механического момента, развиваемого электродвигателем, со значением механического момента нагрузки на его валу за счет изменения напряжения питания двигателя. При этом скорость вращения ротора электродвигателя остается прежней, а коэффициент мощности повышается. Это оборудование является функционально законченным и не требует подключения дополнительных устройств.
При работе привода в режиме динамично меняющихся нагрузок контроллер обеспечивает прекращение отбора мощности из питающей сети в те моменты, когда полупроводниковые переходы тиристоров (управляемых диодов) закрыты, то есть не пропускают электрический ток. Тиристоры открываются при поступлении управляющих импульсов, задержка подачи которых определяется степенью загрузки привода, а закрываются при переходе тока через ноль.
Важно!
Скорость реакции контроллера-оптимизатора на изменение нагрузки составляет сотые доли секунды.
Возможности
Контроллеры-оптимизаторы обеспечивают повышение КПД дробилок, вентиляторов, ленточных транспортеров, обрабатывающих станков, крутильных агрегатов, лебедок и другого оборудования, используемого в промышленности, сельском хозяйстве и сфере ЖКХ. В том числе эти устройства предотвращают перегрузки кронштейнов при запуске мешалок, нейтрализуют гидроудары в трубопроводах, обеспечивают плавный запуск тяжело и очень тяжело нагруженного оборудования, на что не способны обычные устройства плавного пуска, и др.
Стоимость
Контроллеры-оптимизаторы обеспечивают повышение КПД оборудования, а кроме того, они, в сравнении с преобразователями, более доступны по цене. Например, устройство от отечественного производителя мощностью 90 кВт можно купить примерно за 90–140 тысяч рублей.
Достоинства и недостатки
Контроллеры-оптимизаторы оперативно реагируют на изменение напряжения, снижают расходы электроэнергии на 30–40%, уменьшают влияние реактивной нагрузки на сеть, повышают КПД привода, позволяют сократить расходы на конденсаторные компенсирующие устройства, продлевают срок службы оборудования и повышают экологичность производства. Кроме того, они отличаются более доступной ценой, нежели преобразователи частоты. Единственным ограничением для применения контроллера является невозможность его использования в тех случаях, когда необходимо изменять скорость вращения электродвигателя.
Выбираем лучшее решение для повышения КПД
Выбор устройства для повышения КПД двигателя того или иного электропривода определяется особенностями работы оборудования. Так, если скорость привода нужно изменять, то единственно возможным решением является покупка преобразователя частоты. Если скорость вращения двигателя менять нельзя или это делать необязательно, то лучшим решением будет использование контроллеров-оптимизаторов, которые имеют более доступную стоимость, чем «частотники».
Повышение коэффициента мощности в промышленных сетях
Повышение коэффициента мощности промышленного предприятия сводится в основном к рационализации работы основных потребителей реактивной мощности — асинхронных двигателей и трансформаторов.
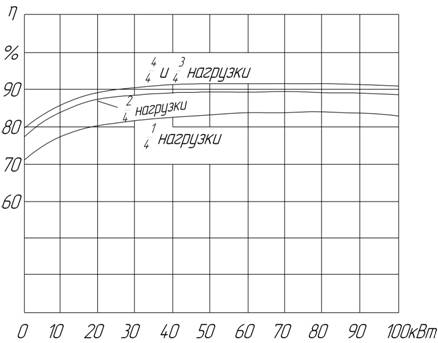
Рис.1. Зависимость средних значений к.п.д. от мощности (для асинхронных двигателей открытого и защищенного типов).
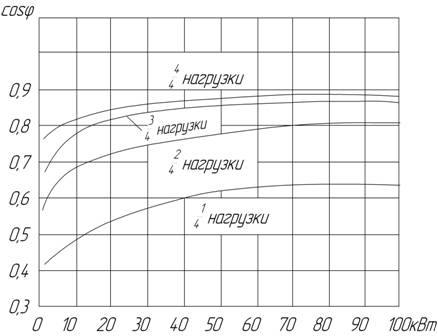
Рис. 2. Зависимость средних значений cos φ от мощности (для асинхронных двигателей открытого и защищенного типов).
Ниже приводятся основные мероприятия, направленные к рационализации работы асинхронных двигателей:
1. Замена малозагруженных двигателей двигателями меньшей мощности или замена на двигатели той же мощности, но с улучшенными характеристиками.
При замене двигателя двигателем меньшей мощности часто потери активной мощности из-за более низкого номинального к. п. д. нового двигателя могут остаться неизменными или же увеличиться (рис.1), а потребление реактивной мощности в ряде случаев уменьшиться (рис.2). Поэтому следует проверить целесообразность замены двигателей. Кроме того, следует учесть стоимость монтажных работ при замене двигателя.
Пример. Для привода центробежного наcoca установлен двигатель типа АД-82/2, который имеет следующие данные: Р = 60 кВт; Uн4 = 380 В; ηн = 0,895; cos φн = 0,91; Т= 4 000 час/год.
Стоимость электроэнергии 2 pyб/кВтч — kэ = 0,1. Предположим, что фактическая загрузка двигателя Р = 30 кВт при cosφ1 = 0,81, η1 = 0,87 и Q1 = 24,7 кВАр.
Определить целесообразность замены указанного двигателя на двигатель типа АД-72/2, имеющего данные: Рн = 35 кВт; Uн = 380 В; ηн = 0,89; cosφн = 0,90; I0 = 23,0 а.
Коэффициент загрузки двигателя АД-72/2 Р
, к.п.д. при этом .
Реактивная мощность, потребляемая двигателем, определяется формулой
где Q0 — потребляемая реактивная мощность холостого хода. В данном случае
Следовательно,
Уменьшение потерь активной мощности в самом двигателе при замене находим из выражения
Так как , то замена целесообразна при любом kэ
Общая экономия потерь активной мощности равна:
Годовую экономию получим:
Следовательно, в данном случае такая замена двигателей целесообразна и дает значительную годовую экономию.
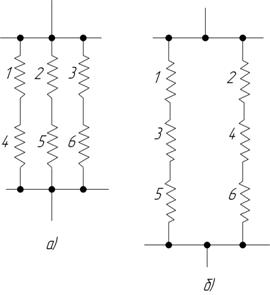
Рис.3. Принципиальная схема переключения статорной обмотки асинхронного двигателя с трех параллельных ветвей на две.
2. Понижение рабочего напряжения для двигателей, работающих с малыми коэффициентами загрузки, путем:
1) Переключения малозагруженных двигателей (при загрузке 35% и ниже) напряжением 127/220 и 220/380 В с треугольника на звезду с помощью специальных переключателей или постоянной перепайкой статорных обмоток. Для двигателей с часто изменяющейся нагрузкой применяются автоматические переключатели с треугольника на звезду и обратно.
2) Секционирование статорных обмоток двигателей, загруженных до 50% номинальной мощности (рис. 3). Это мероприятие на практике осложняется необходимостью изготовления переключателей и перемотки обмотки с устройством до 18 выводов для их перепайки или их присоединения к переключателю. Коэффициент мощности при этом повышается с 0,5 до 0,8.
3) Понижение напряжения фабрично-заводских силовых сетей путем переключения ответвлений понижающих цеховых трансформаторов для случая, когда все двигатели в цехе мало загружены и питаются от одного и того же трансформатора.
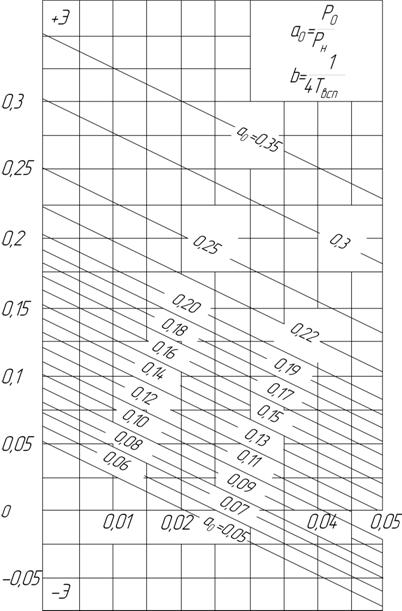
Рис. 4. Диаграмма для нахождения показателя эффективности Э в зависимости от мощности х.х. электропривода.
3. Ограничение времени работы двигателей на х. х., которое осуществляется на практике чаще всего с помощью автоматических ограничителей.
Если межоперационное время превышает 10 сек., применение ограничителей х. х. дает экономию активной и реактивной энергии, которая подсчитывается из выражений
где z — число технологических циклов в час;
Рн — номинальная мощность двигателя, кВт;
Э — коэффициент эффективности, определяемый по диаграмме рис. 4 в зависимости от мощности х. х. двигателя, измеряемой ваттметром;
Эр — коэффициент эффективности, определяемый по диаграмме рис. 5 в зависимости от номинального коэффициента мощности двигателя;
Твсп — продолжительность вспомогательного времени, сек/цикл.
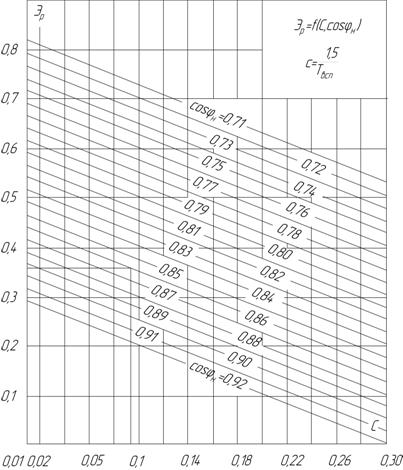
Рис.5 Диаграмма для нахождения показателя эффективности Эр, определяемого в зависимости от номинального коэффициента мощности асинхронного двигателя.
Пример. Станок револьверный типа Р-136. Двигатель АД-42/4;
Рн =5,8 кВт; cos φн = 0,86; P0 = 1,25 кВт; режим: Твсп = 16 сек.;
z = 38 циклов/час;
находим по диаграмме рис. 4 Э = 0,175, тогда
По cos φн = 0,86 и
находим из диаграммы рис. 5 Эр=0,355, тогда
4. Повышение качества ремонта асинхронных двигателей. Выпуск из ремонта двигателей с большой неравномерностью загрузки отдельных фаз с увеличенным током х. х. или с отклонением от заводских обмоточных данных вызывает значительное повышение потребления двигателями реактивной мощности из сети.
5. Рационализация работы трансформаторов, заключающаяся в замене и перегруппировке их, а также отключении трансформаторов во время работы на холостом ходу.
Если при этом потребление реактивной мощности снижается, а потери активной мощности увеличиваются или наоборот, то следует решить целесообразность замены и перегруппировки трансформаторов.