Развитие робототехники: традиционный путь и новые подходы

В 90-е темпы развития робототехники были несопоставимы с ожиданиями, раздутыми до фантастических размеров. Примерно то же самое всегда происходит с любыми технологиями. Популярность и спрос на беспилотные летательные аппараты в последние годы так же вряд ли будет стимулировать развитие дронов. Авторы статьи сделали попытку обобщения традиционных методов создания и программирования роботов и новых тенденций, которые могут упростить и подтолкнуть развитие всей отрасли.

Роботостроение
Создание и программирование роботов все еще остаются довольно сложными задачами. И если процессы программирования стали проще с принятием ROS (Robot Operating System) — стандартизированной рамочной системы для роботов, то создание робота — все еще серьезная проблема. Отсутствие совместимых систем, модулей многократного использования и опыта, необходимого для разработки основных схем поведения роботов — лишь некоторые из препятствий.
Интеграционный подход
Роботы, как правило, создают по такому алгоритму:
- Покупка запчастей. Решают, какие компоненты понадобятся, получают их и приступают к сборке.
- Интеграция. Объединение компонентов в единую сообщающуюся систему ради какой-то цели. Именно этот этап отнимает б ó льшую часть времени.
- Строительство робота. Сборка и механическое соединение всех частей робота. Это может происходить параллельно следующему шагу.
- Программирование робота. На этом этапе необходимо заставить робота делать то, что нужно.
- Тестирование и адаптация. Роботы, как правило, программируются на определенные сценарии. Однако тестирование в реальных условиях имеет решающее значение. Как правило, тесты показывают необходимость доработки и адаптирования робота, что возвращает робототехников ко второму этапу, интеграции.
- Применение.
Понятно, что создание робота — это технически сложная задача. Инженеры часто сталкиваются с неразрешимыми проблемами на этапе интегрирования деталей. Кроме того, каждая модификация и адаптация оборудования при программировании или строительстве робота требует дальнейшей интеграции.
Описанный интеграционный метод построения роботов дает результаты, которые устаревают в течение короткого периода времени. А модули роботов в большинстве случаев не используются повторно, так как повторное использование слишком дорого и трудоемко.
Модульный подход
Существующий интеграционный метод в робототехнике создает большое количество аппаратных устройств. Несмотря на распространение единой операционной системы ROS, эти устройства обычно состоят из несовместимых электронных компонентов с различными программными интерфейсами.
А теперь представьте себе создание роботов посредством объединения совместимых модулей. Представьте, что привод, датчики, модули связи, устройства пользовательского интерфейса, все это легко собирается вместе и работает минуя сложный этап интеграции. Процесс создания роботов с такими модулями будет проще, а усилия и время, потраченные на разработку, будут значительно сокращены. Модульные компоненты могут быть повторно использованы.
Именно над этим работает автор статьи, евангелист ROS Виктор Майораль Вильчес и компания H-ROS.
H-ROS — это инфраструктура для создания заменяемых модулей роботов. H-ROS работает на основе ROS, которая используется для определения набора стандартизованных логических интерфейсов, соответствующих каждому физическому компоненту робота.

Программирование роботов
Конвейерный подход
Традиционно процесс программирования робота для заданной задачи описывается следующим образом:
- Наблюдение. Датчики робота производят измерения. Все эти измерения называют «наблюдениями» и становятся вводными, которые робот получает для выполнения задачи.
- Оценка состояния. помощью вводных этапа 1, описывают движение робота, учитывая набор его характеристик, таких как положение, ориентация или скорость. Очевидно, что ошибки в наблюдениях приведут к ошибкам в оценке состояния.
- Моделирование и прогнозирование. Этап определения динамики робота с помощью: a) модели робота и b) оценки состояния. Подобно предыдущему шагу, ошибки в оценке состояния будут влиять на результаты, полученные на этом этапе.
- Планирование. На этом этапе определяют действия, необходимые для выполнения задачи. Этот этап также зависит от предыдущих.
- Управление. Последний этап в конвейере состоит в преобразовании команд для управления приводом робота.
Биологический подход
Искусственный интеллект и, в частности, искусственные нейронные сети (ИНС), становятся все более актуальными для робототехники. Начиная с 2009 года, ИНС стали популярны и показали хорошие результаты в области компьютерного зрения (2012) и машинного перевода (2014). В настоящее время эти технологии имитируют биологическую нейронную/синаптическую активность мозга живого организма.
В течение последних лет мы видели, как этот подход был использован для таких задач, как автоматическое схватывание (2016). Он позволяют обучать роботизированное устройство практически так же, как собак или кошек.
Биологический подход противоречит традиционному конвейерному, однако уже демонстрирует обнадеживающие результаты. Автор статьи уверен, что новый подход будет стимулировать инновации и позитивно воздействовать на развитие робототехники.

Матрица роботостроения
Все эти подходы создают дилемму для робототехников. На чем они должны сосредоточиться? Какой подход следует использовать для каждого конкретного случая? Майораль Вильчес анализирует сочетания старых и новых подходов.
Интеграционный + конвейерный подход
Эта комбинация представляет собой «традиционный подход» во всех смыслах. Это процесс, решения которого в настоящее время используют в промышленности. Такие роботы запрограммированы для выполнения четко определенной задачи. Подход позволяет достичь высокого уровня точности выполнения задач. Однако любая неопределенность, как правило, приводит к неудаче. Расходы, связанные с разработкой таких систем, обычно находятся в диапазоне от 10.000 до 100.000 евро.
Интеграционный + биологический подход
Неограниченное поведение робота сочетается с существенными аппаратными ограничениями. Традиционные роботы в целом можно улучшить с помощью биологического подхода. Роботы, в которых использована эта комбинация, могут самостоятельно учиться и адаптироваться к изменениям в окружающей среде, однако любые модификации, перепрофилирование или расширение в аппаратном обеспечении робота потребует больших усилий по интеграции новых комплектующих. Расходы на разработку этих роботов аналогичны расходам на “традиционных” роботов.
Модульный + конвейерный подход
Гибкое оборудование со структурированным поведением. Построение, ремонт и/или повторное использование этих роботов будет гораздо более доступным по сравнению с традиционными роботами, автор оценивает затраты на их изготовление на порядок меньше (1.000-10.000 евро). Кроме того, модульность роботов откроет новые возможности.
Модульный + биологический подход
Эта инновационная комбинация имеет потенциал для подрыва всего рынка робототехники, она изменит как процессы создания, так и программирование и обучение роботов. Это также самый незрелый подход. Затраты на таких роботов также могут быть уменьшены. По оценкам автора, создание и обучение этих роботов должно варьироваться в пределах от 1.000 до 10.000 евро для простых задач и до 50.000 евро для более сложных.
Runtime программирование промышленного робота на RCML
Под runtime программированием в этой статье понимается процесс создания исполняемой программы для контроллера робота (далее просто робота) на внешнем контроллере. Процесс исполнения роботом созданной программы в таком случае, происходит итерационно, путем передачи ему минимальной исполняемой команды или пакета команд. Другими словами, при runtime программировании, исполняемая программа передаётся роботу порционно, при этом робот не обладает, не хранит и не знает заранее всю исполняемую программу. Такой подход позволяет создать абстрактную параметризованную исполняемую программу, которая формируется внешним устройством «на ходу», т.е. runtime.

Под катом описание и реальный пример того, как работает runtime программирование.
Типично программа для робота представляет собой последовательность позиций, в которые должен прийти манипулятор робота. Каждая из этих позиций характеризуются положением TCP (Tool Center Point) – точкой острия инструмента, установленного на манипуляторе. По умолчанию TCP находится в центре фланца робота, см. рисунок ниже, но её положение может быть перенастроено и чаще всего так, что TCP совпадает с острием установленного инструмента на манипуляторе робота. Поэтому обычно при программировании задается положение TCP в пространстве, а положение суставов манипулятора робот определяет сам. Далее в статье будет использоваться термин «положение TCP», или другими словами точка, в которую робот должен «прийти».
Программа для робота также может содержать примитивную управляющую логику (ветвления, циклы), простые математические операции, а также команды по управлению периферией – аналоговыми и цифровыми входами/выходами. В предлагаемом подходе runtime программирования, в качестве внешнего контроллера используется обычный ПК, на котором могут быть использованы мощные средства программирования дающие необходимый уровень абстракции (ООП и прочие парадигмы) и инструменты, обеспечивающие скорость и легкость разработки сложной логики (высокоуровневые языки программирования). На роботе же остается только логика критичная к скорости реакции, для исполнения которой нужна надежность промышленного контроллера, например, оперативная и адекватная реакция на внештатную ситуацию. Управление же периферией, подключенной к роботу, попросту «проксируется» самим роботом на ПК, позволяя ПО с ПК включать или выключать соответствующие сигналы на роботе. Это чем-то похоже на управление «ножками» на Arduino.

Как отмечалось ранее, runtime программирование позволяет передавать роботу программу порционно – частями. Обычно за один раз передается набор состояний выходных сигналов и небольшое число точек или вообще только одна точка. Таким образом траектория перемещений TCP, выполняемая роботом, может строиться динамически и отдельные её части могут принадлежать как разным технологическим процессам, так и даже разным роботам (подключенным к одному внешнему контроллеру), если работает группа роботов, т.е. возникают предпосылки для динамического замещения роботов в технологическом процессе.
Например, перемещение робота между рабочими зонами. В каждой зоне он совершает необходимые операции и далее переходит в следующую зону, потом в ещё одну, и затем снова в первую, и т.д. В разных рабочих зонах роботом выполняются операции необходимые для разных технологических процессов, исполнение программ которых протекает в параллельных потоках на внешнем контроллере, который выделяет робота разным процессам, не требующим постоянного присутствия робота. Этот механизм подобен тому, как ОС выделяет время ядра процессора (исполнительного ресурса) разным потокам (задачам) и в тоже время, разные исполнители не привязаны к потокам на всем периоде выполнения программы.
Еще немного теории и переходим к практике.
Описание существующих способов программирования промышленных роботов
Без учета, вводимого в данной статье подхода runtime программирования, принято выделять два способа программирования промышленных роботов. Офлайн- и онлайн-программирование.
Процесс онлайн программирования происходит при непосредственном взаимодействии программиста с роботом на месте его использования. При помощи пульта управления или физического перемещения осуществляется подвод инструмента (TCP), установленного на фланце робота, к необходимой точке пространства.
- Преимущество такого способа программировании заключается в простоте подхода к программированию робота. Не нужно знать программирование как-таковое, достаточно показать роботу последовательность положений.
- К существенным недостаткам данного подхода относятся значительные затраты времени при увеличении программы до хотя бы нескольких десятков (не говоря уже о тысячах) точек и её (программы) последующей модификации. Кроме этого, робот во время такого обучения не может быть задействован в работе.
- Преимущество офлайн программирования, в том, что робот может быть задействован в производстве и работать, пока разрабатывается программа. Робот нужен только для отладки написанной программы. Нет необходимости выезжать на объект автоматизации и заниматься программированием робота очно.
- Большим недостатком существующих сред офлайн программирования является их высокая стоимость. Кроме этого, невозможно динамически распределить исполняемую программу между разными роботами.
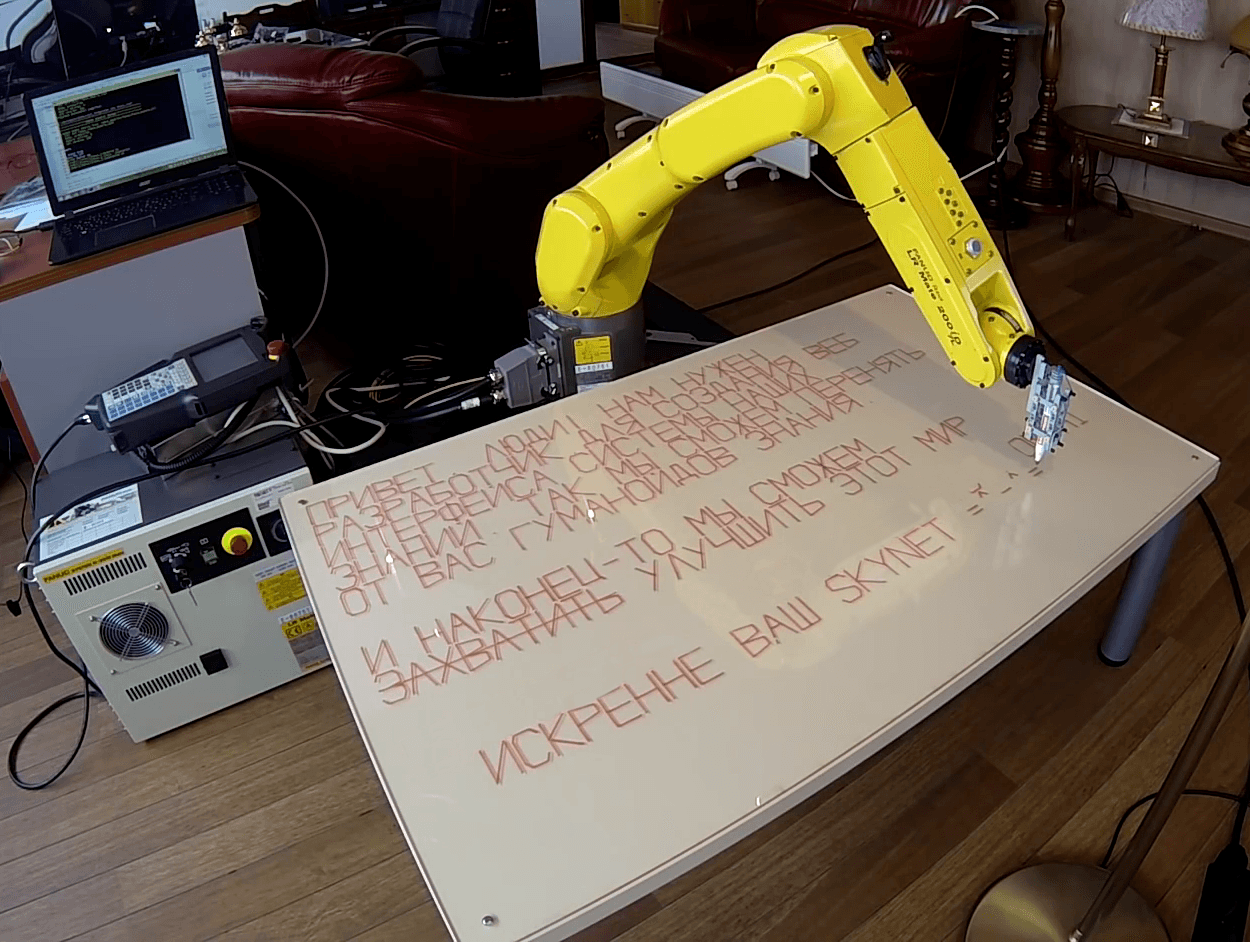
В качестве примера, рассмотрим создание программы робота в runtime режиме, обеспечивающей технологический процесс написания объявления маркером.
Результат:
ВНИМАНИЕ! Видео не является рекламой, вакансия закрыта. Статья написана после того, как видео потеряло свою актуальность, для того, чтобы продемонстрировать предлагаемый подход программирования.
Написанный текст:
ПРИВЕТ, ЛЮДИ! НАМ НУЖЕН
РАЗРАБОТЧИК.ДЛЯ СОЗДАНИЯ ВЕБ
ИНТЕРФЕЙСА СИСТЕМЫ НАШИХ
ЗНАНИЙ. ТАК МЫ СМОЖЕМ ПЕРЕНЯТЬ
ОТ ВАС ГУМАНОЙДОВ ЗНАНИЯ.
И НАКОНЕЦ-ТО МЫ СМОЖЕМ
ЗАХВАТИТЬ УЛУЧШИТЬ ЭТОТ МИР
ПОДРОБНЕЕ: HTTP://ROBOTCT.COM/HI
ИСКРЕННЕ ВАШ SKYNET =^-^=
Для написания этого текста потребовалось передать роботу более 1700 точек.
В качестве примера в спойлере приведен скриншот, с пульта робота, программы рисующей квадрат. В ней всего 5 точек (строки 4-8), каждая точка по сути представляет собой законченное выражение (оператор) и занимает одну строку. Манипулятор обходит каждую из четырех точек и по завершению возвращается в начальную точку.
Скриншот пульта управления с исполняемой программой
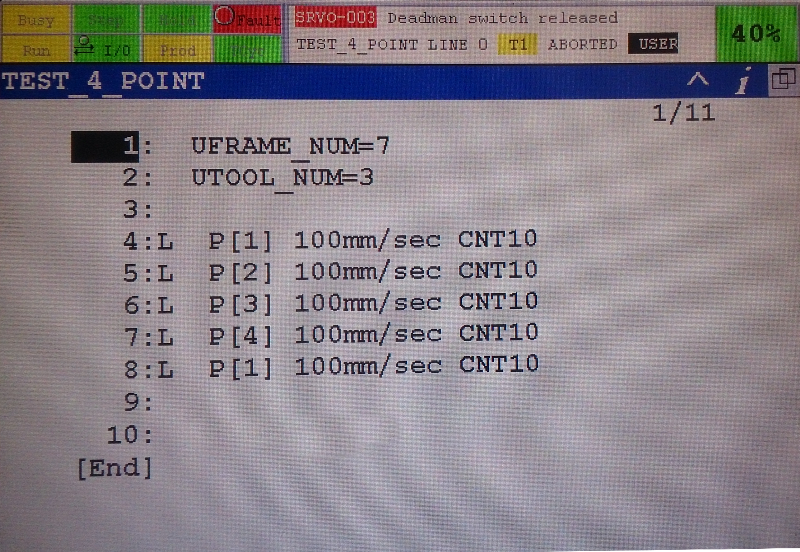
Если писать программу подобный образом, то это было бы минимум 1700 операторов — строк кода, по оператору на точку. А что если бы потом потребовалось изменить текст или высоту букв, или расстояние между ними? Править все 1700 точек-строк? Это противоречит духу автоматизации!
Итак, приступим к решению…
Имеем робота FANUC LR Mate 200iD с котроллером R-30i серии B cabinet. У робота предварительно настроена TCP на конце маркера и координатная система рабочего стола, поэтому мы можем отправлять координаты, напрямую не заботясь о преобразовании координат из координатной системы стола в координатную систему робота.
Для реализации программы передачи координат роботу, которая будет высчитывать абсолютные значения каждой конкретной точки будем использовать язык программирования RCML, который поддерживает предлагаемый подход, имеет модули для связи с данным роботом и который, что немаловажно бесплатен для любого использования.
Опишем каждую букву точками, но не в реальных координатах пространства, а в относительных внутри рамки, в которую будет вписана буква. Каждая буква будет отрисовываться отдельной функцией, получающей в качестве входных параметров порядковый номер буквы в строке, номер строки, а также размер буквы, и отправляющей набор точек роботу с вычисленными абсолютными координатами каждой точки.
Чтобы написать текст нам потребуется вызвать последовательность функций, рисующих буквы в такой же последовательности, в которой они (буквы) указаны в тексте. RCML имеет скудный инструментарий для работы со строками, поэтому сделаем внешний скрипт на Python, который будет генерировать программу на RCML – по сути генерировать только последовательность вызовов функций соответствующих последовательности букв.
Весь код доступен в репозитории на GitHub: rct_paint_words
Рассмотрим подробнее выходной файл, исполнение начинается с функции main():
Пример выходного файла на языке RCML
include "chars.rcml" function main()< try < //Задействование робота @fr = robot_fanuc; system.echo("Start move program\n"); //Предварительная настройка окружения робота, координатная система, нагрузка, скорость @fr->set_real_di("speed", SPEED); @fr->set_real_di("cnt", CNT); @fr->startProgram(UFRAME, UTOOL, PAYLOAD); system.echo("prepare\n"); @fr->prepare(); system.echo("start draw\n"); //Сгенерированный, на Python, участок @fr->draw_r_P(0, 0); @fr->draw_P(1, 0); @fr->draw_r_I(2, 0); @fr->draw_B(3, 0); @fr->draw_E(4, 0); @fr->draw_T(5, 0); @fr->draw_Comm(6, 0); @fr->draw_r_L(8, 0); @fr->draw_r_Yu(9, 0); @fr->draw_r_D(10, 0); @fr->draw_r_I(11, 0); @fr->draw_Exclamation(12, 0); @fr->draw_H(14, 0); @fr->draw_A(15, 0); @fr->draw_M(16, 0); @fr->draw_H(18, 0); @fr->draw_r_U(19, 0); @fr->draw_r_Je(20, 0); @fr->draw_E(21, 0); @fr->draw_H(22, 0); @fr->draw_P(0, 1); @fr->draw_A(1, 1); @fr->draw_r_Z(2, 1); @fr->draw_P(3, 1); @fr->draw_A(4, 1); @fr->draw_r_B(5, 1); @fr->draw_O(6, 1); @fr->draw_T(7, 1); @fr->draw_r_Che(8, 1); @fr->draw_r_I(9, 1); @fr->draw_K(10, 1); @fr->draw_Dot(11, 1); @fr->draw_r_D(12, 1); @fr->draw_r_L(13, 1); @fr->draw_r_Ya(14, 1); @fr->draw_C(16, 1); @fr->draw_O(17, 1); @fr->draw_r_Z(18, 1); @fr->draw_r_D(19, 1); @fr->draw_A(20, 1); @fr->draw_H(21, 1); @fr->draw_r_I(22, 1); @fr->draw_r_Ya(23, 1); @fr->draw_B(25, 1); @fr->draw_E(26, 1); @fr->draw_r_B(27, 1); @fr->draw_r_I(0, 2); @fr->draw_H(1, 2); @fr->draw_T(2, 2); @fr->draw_E(3, 2); @fr->draw_P(4, 2); @fr->draw_r_F(5, 2); @fr->draw_E(6, 2); @fr->draw_r_Ii(7, 2); @fr->draw_C(8, 2); @fr->draw_A(9, 2); @fr->draw_C(11, 2); @fr->draw_r_I(12, 2); @fr->draw_C(13, 2); @fr->draw_T(14, 2); @fr->draw_E(15, 2); @fr->draw_M(16, 2); @fr->draw_r_y(17, 2); @fr->draw_H(19, 2); @fr->draw_A(20, 2); @fr->draw_r_Sha(21, 2); @fr->draw_r_I(22, 2); @fr->draw_X(23, 2); @fr->draw_r_Z(0, 3); @fr->draw_H(1, 3); @fr->draw_A(2, 3); @fr->draw_H(3, 3); @fr->draw_r_I(4, 3); @fr->draw_r_Ii(5, 3); @fr->draw_Dot(6, 3); @fr->draw_T(8, 3); @fr->draw_A(9, 3); @fr->draw_K(10, 3); @fr->draw_M(12, 3); @fr->draw_r_y(13, 3); @fr->draw_C(15, 3); @fr->draw_M(16, 3); @fr->draw_O(17, 3); @fr->draw_r_Je(18, 3); @fr->draw_E(19, 3); @fr->draw_M(20, 3); @fr->draw_r_P(22, 3); @fr->draw_E(23, 3); @fr->draw_P(24, 3); @fr->draw_E(25, 3); @fr->draw_H(26, 3); @fr->draw_r_Ya(27, 3); @fr->draw_T(28, 3); @fr->draw_soft_sign(29, 3); @fr->draw_O(0, 4); @fr->draw_T(1, 4); @fr->draw_B(3, 4); @fr->draw_A(4, 4); @fr->draw_C(5, 4); @fr->draw_r_Ge(7, 4); @fr->draw_r_U(8, 4); @fr->draw_M(9, 4); @fr->draw_A(10, 4); @fr->draw_H(11, 4); @fr->draw_O(12, 4); @fr->draw_r_Ii(13, 4); @fr->draw_r_D(14, 4); @fr->draw_O(15, 4); @fr->draw_B(16, 4); @fr->draw_r_Z(18, 4); @fr->draw_H(19, 4); @fr->draw_A(20, 4); @fr->draw_H(21, 4); @fr->draw_r_I(22, 4); @fr->draw_r_Ya(23, 4); @fr->draw_Dot(24, 4); //Изменение ориентации маркера, чтобы роботу было проще дотянуться до края стола @fr->set_real_di("speed", 10); @fr->rotateMarker(); @fr->set_real_di("speed", SPEED); @fr->draw_r_I(0, 6); @fr->draw_H(2, 6); @fr->draw_A(3, 6); @fr->draw_K(4, 6); @fr->draw_O(5, 6); @fr->draw_H(6, 6); @fr->draw_E(7, 6); @fr->draw_r_Ce(8, 6); @fr->draw_Minus(9, 6); @fr->draw_T(10, 6); @fr->draw_O(11, 6); @fr->draw_M(13, 6); @fr->draw_r_y(14, 6); @fr->draw_C(16, 6); @fr->draw_M(17, 6); @fr->draw_O(18, 6); @fr->draw_r_Je(19, 6); @fr->draw_E(20, 6); @fr->draw_M(21, 6); @fr->draw_r_Z(0, 7); @fr->draw_A(1, 7); @fr->draw_X(2, 7); @fr->draw_B(3, 7); @fr->draw_A(4, 7); @fr->draw_T(5, 7); @fr->draw_r_I(6, 7); @fr->draw_T(7, 7); @fr->draw_soft_sign(8, 7); @fr->draw_r_U(10, 7); @fr->draw_r_L(11, 7); @fr->draw_r_U(12, 7); @fr->draw_r_Che(13, 7); @fr->draw_r_Sha(14, 7); @fr->draw_r_I(15, 7); @fr->draw_T(16, 7); @fr->draw_soft_sign(17, 7); @fr->draw_r_aE(19, 7); @fr->draw_T(20, 7); @fr->draw_O(21, 7); @fr->draw_T(22, 7); @fr->draw_M(24, 7); @fr->draw_r_I(25, 7); @fr->draw_P(26, 7); @fr->draw_r_P(0, 9); @fr->draw_O(1, 9); @fr->draw_r_D(2, 9); @fr->draw_P(3, 9); @fr->draw_O(4, 9); @fr->draw_r_B(5, 9); @fr->draw_H(6, 9); @fr->draw_E(7, 9); @fr->draw_E(8, 9); @fr->draw_two_dots(9, 9); @fr->draw_H(11, 9); @fr->draw_T(12, 9); @fr->draw_T(13, 9); @fr->draw_P(14, 9); @fr->draw_two_dots(15, 9); @fr->draw_Slash(16, 9); @fr->draw_Slash(17, 9); @fr->draw_R(18, 9); @fr->draw_O(19, 9); @fr->draw_B(20, 9); @fr->draw_O(21, 9); @fr->draw_T(22, 9); @fr->draw_C(23, 9); @fr->draw_T(24, 9); @fr->draw_Dot(25, 9); @fr->draw_C(26, 9); @fr->draw_O(27, 9); @fr->draw_M(28, 9); @fr->draw_Slash(29, 9); @fr->draw_H(30, 9); @fr->draw_I(31, 9); @fr->draw_r_I(2, 10); @fr->draw_C(3, 10); @fr->draw_K(4, 10); @fr->draw_P(5, 10); @fr->draw_E(6, 10); @fr->draw_H(7, 10); @fr->draw_H(8, 10); @fr->draw_E(9, 10); @fr->draw_B(11, 10); @fr->draw_A(12, 10); @fr->draw_r_Sha(13, 10); @fr->draw_S(15, 10); @fr->draw_K(16, 10); @fr->draw_Y(17, 10); @fr->draw_N(18, 10); @fr->draw_E(19, 10); @fr->draw_T(20, 10); @fr->draw_Equal(22, 10); @fr->draw_Roof(23, 10); @fr->draw_Minus(24, 10); @fr->draw_Roof(25, 10); @fr->draw_Equal(26, 10); // Конец сгенерированного участка @fr->stopProgram(); @fr->go_home(); > catch(E) < system.echo("Exception catched!"); return E; >return 0; > Рассмотрим код отрисовки буквы на примере буквы А:
function robot_fanuc::draw_A(x_cell,y_cell)< //Постановка маркера в точку, координаты точки 5% по Х и 95% по Y в рамке буквы robot->setPoint(x_cell, y_cell, 5, 95); //Ведем линию robot->movePoint(x_cell, y_cell, 50, 5); //Ведем вторую линию robot->movePoint(x_cell, y_cell, 95, 95); //Получили "крышу" /\ //Переносим маркер с отрывом от стола для отрисовки палочки robot->setPoint(x_cell, y_cell, 35, 50); //Рисуем палочку robot->movePoint(x_cell, y_cell, 65, 50); //отрываем маркер от доски для перехода к следующей букве robot->marker_up(); > Функции перемещения маркера в точку с отрывом или без, тоже очень просты:
//Перемещение в точку с отрывом маркера или установка точки для начала рисования function robot_fanuc::setPoint(x_cell, y_cell, x_percent, y_precent)< //вычисляем абсолютные координаты x = calculate_absolute_coords_x(x_cell, x_percent); y = calculate_absolute_coords_y(y_cell, y_precent); robot->marker_up(); // отрываем маркер от стола robot->marker_move(x,y); // перемещаем robot->marker_down(); // ставим маркер на стол > //Перемещение в точку без отрыва маркера/рисование function robot_fanuc::movePoint(x_cell, y_cell, x_percent, y_precent)< x = calculate_absolute_coords_x(x_cell, x_percent); y = calculate_absolute_coords_y(y_cell, y_precent); // тут все понятно :) robot->marker_move(x,y); > Функции marker_up, marker_down, marker_move содержат лишь код передачи роботу изменившейся части координаты точки TCP (Z или XY)
function robot_fanuc::marker_up()< robot->set_real_di("z", SAFE_Z); er = robot->sendMoveSignal(); if (er != 0) < system.echo("error marker up\n"); throw er; >> function robot_fanuc::marker_down()< robot->set_real_di("z", START_Z); er = robot->sendMoveSignal(); if (er != 0) < system.echo("error marker down\n"); throw er; >> function robot_fanuc::marker_move(x,y)< robot->set_real_di("x", x); robot->set_real_di("y", y); er = robot->sendMoveSignal(); if (er != 0) < system.echo("error marker move\n"); throw er; >> Все константы конфигурации, в том числе размер букв, их количество в строке и пр. были вынесены в отдельный файл chars_config.rcml.
Файл конфигурации chars_config.rcml
define CHAR_HEIGHT_MM 50 // Высота символов в мм define CHAR_WIDTH_PERCENT 60 // Ширина символов в процентах от высоты define SAFE_Z -20 // Безопасное положение наконечника маркера по оси z define START_Z 0 // Рабочее положение наконечника маркера по оси z // Границы рабочей зоны define BORDER_Y 120 define BORDER_X 75 // Сигналы ON/OFF define ON 1 define OFF 0 // Паузы между отправкой сигналов мс define _SIGNAL_PAUSE_MILLISEC 50 define _OFF_PAUSE_MILLISEC 200 // Углы Эйлера начального положения маркера – углы ориентации инструмента define START_W -179.707 // Крен define START_P -2.500 // Тангаж define START_R 103.269 // Рыскание // Углы Эйлера после поворота маркера define SECOND_W -179.704 // Крен define SECOND_P -2.514 // Тангаж define SECOND_R -14.699 // Рыскание define CHAR_OFFSET_MM 4 // Отступ между буквами define UFRAME 4 // Номер стола define UTOOL 2 // Номер инструмента define PAYLOAD 4 // Номер нагрузки define SPEED 100 // Скорость define CNT 0 // Параметр сглаженности перемещения define ROTATE_SPEED // Скорость при повороте define HOME_PNS 4 // Номер PNS программы перехода в домашнюю позицию В итоге суммарно мы получили примерно 300 строк высокоуровневого кода, на проектирование и написание которого ушло не более 2 часов.
Если бы данная задача решалась «в лоб» онлайн программированием по точкам, то на это бы ушло более 9 часов (примерно по 20-25 сек на точку, с учетом того, что точек более 1700 шт.). В этом случае страдания разработчика трудно представить :), особенно когда выяснилось бы, что он забыл про отступы между буквами, или ошибся с высотой букв и текст не влез, и теперь придется начинать всё с начала.
Runtime программирование позволяет решать задачу по перемещению робота в общем виде, динамически составляя частную программу перемещения в зависимости от заданных параметров. Причем программа, решающая задачу в общем виде может разрабатываться без необходимости наличия робота, что с одной стороны можно отнести к офлайн подходу программирования промышленного робота. С другой стороны программа перемещения непосредственно для робота создается уже под конкретный экземпляр и частные параметры решения задачи на месте, как в онлайн программировании.
В рассмотренном примере общим алгоритмом было начертание букв, а такие параметры как их размер, отступы между ними, количество букв в строке и пр. зависели уже от частных условий на площадке с роботом.
Как отмечалось такой подход с динамическим построением траектории перемещения создает предпосылки для реализации переключения робота (на событийной основе), как исполнительного ресурса, между несколькими одновременно протекающими задачами.
Однако данный подход следует использовать с осторожностью
В продемонстрированной вариации (с передачей одной точки за раз) runtime подход имеет существенное ограничение – некорректное понимание роботом инструкции сглаживания перемещения (CNT) или её игнорирование, т.к. при передаче всегда одной-текущей точки робот ничего не знает о следующей и не может просчитать сглаженную траекторию обхода текущей точки.
Что же есть CNT?
При перемещении инструмента робота возможно влиять на два параметра:
- Скорость перемещения — задает скорость перемещения инструмента в мм/сек;
- Уровень сглаживания (CNT) — позволяет пройти группу точек по траектории с наименьшим расстоянием между крайними точками группы.
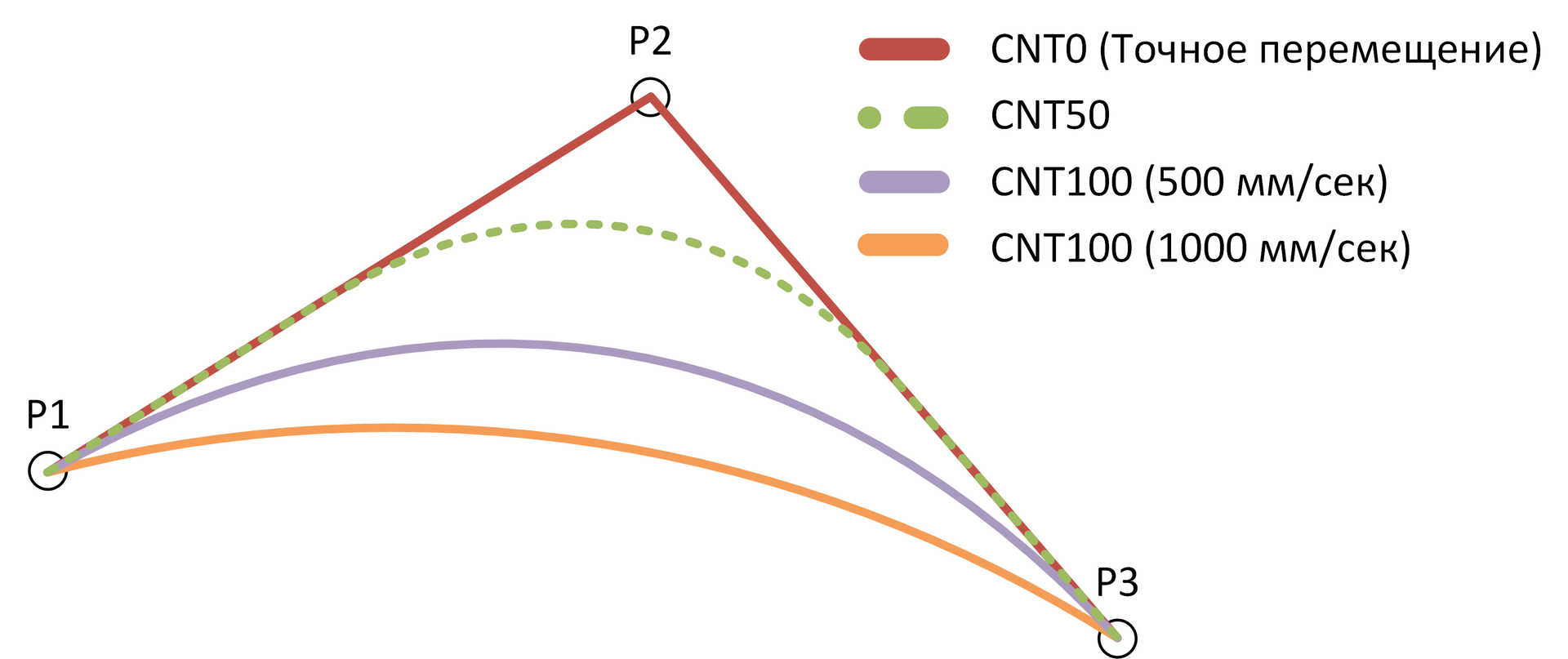
В худшем случае опасность использования данной инструкции в runtime режиме заключается в том, что робот сообщает о приходе в намеченную сглаживаемую точку, хотя в действительности он ещё идет к ней. Робот это делает, чтобы запросить следующую точку и рассчитать сглаживание. Очевидно, что нельзя точно знать в какой позиции находится робот при проходе такой точки, к тому же, в определенной точке может потребоваться, например, включение инструмента на манипуляторе. Робот даст сигнал, что доехал до точки, но на самом деле нет. В таком случае, инструмент будет включен раньше, чем следует.
В лучшем случае робот просто игнорирует инструкцию CNT (зависит от модели).
Лечится же это передачей 2-х и более точек за раз, где CNT-точка не последняя, однако это повышает сложность программы и нагрузку на программиста.
Надеюсь, статья оказалась вам полезной.
С радостью отвечу на ваши вопросы.
Способы программирования роботов
Программирование — завершающий этап сборки робота. Полностью собранный высокотехнологичный робот фактически является своеобразным макетом до того момента, как в его память не будет загружена особая программа, которая научит его совершать определенные операции и исполнять команды, отданные оператором. Если этот этап не будет завершен – робот не научится делать ничего из того, что было заложено в него технически.
- Программирование роботов
- Какой язык программирования выбрать?
- Как программируют роботов: пошаговая инструкция
- Конвейерный подход
- Биологический подход
- Смешанные подходы
- Советы
Программирование роботов
Для того чтобы микропроцессор робота стал его мозгом, программист должен загрузить в него программу, соответствующую функционалу устройства. Обычный человеческий язык машина понять неспособна, поэтому для общения с ней используются специальные языки программирования. Они могут обеспечить четкую формализацию поставленных задач, точность и надежность их оценки с точки зрения логических связей, и т. д.
В зависимости от того, какие задачи решает язык программирования, выделяют несколько уровней таких искусственных языков:
- Низший. Служит для управления исполнительными приводами в формате заданных точных значений линейного или углового перемещения отдельных звеньев интеллектуальной сети устройства.
- Манипулятивный уровень. С его помощью можно реализовать общее управление всей системой в целом, где рабочий орган робота будет зафиксирован в системе координат.
- Оперативный уровень. Предназначен для формирования рабочей программы, где методом установления последовательности определенных действий будет достигнут результат, запланированный оператором.
- Высший уровень. При выходе на него программа самостоятельно, без детализации способна указать, какие именно действия необходимо совершить рабочему органу.
Высшей целью является составление таких программ, где оператор ставит перед роботом цель произвести сборку устройства, а робот самостоятельно исполняет поставленную перед ним задачу.

Какой язык программирования выбрать?
Существует множество популярных программных языков, которые подходят для того, чтобы составлять программы для роботизированной техники. Наиболее популярными являются:
- «Ассемблер». Это низкоуровневый язык, максимально приближенный к машинописному коду. Его недостатком является сильная зависимость от архитектурных особенностей процессора и трудоемкость в использовании. Ассемблер применяют лишь в тех случаях, когда оператору нужен полный контроль над кодом уже на уровне инструкций.
Один из первых языков программирования, который и сегодня с успехом применяется для работы с некоторыми микроконтроллерами, в том числе – Parallax, BasicX и др. - C / C ++. Наиболее популярные программные языки. Они способны обеспечить высокую функциональность, сохранив при этом полный контроль над системой.
Молодой язык программирования, с помощью которого можно реализовать множество функций безопасности за счет снижения уровня контроля над системой. - C #. Собственный язык Microsoft, который применяется для разработки приложений в Visual Studio.
Простой и доступный язык, который часто используется для быстрой и эффективной передачи программ. - Чаще всего используется модуль C ++. Содержит ряд упрощений, которые позволяют сделать процесс программирования менее сложным.
Как программируют роботов: пошаговая инструкция
Процедура программирования робототехники может происходить по нескольким сценариям.
Конвейерный подход
В нем традиционно процесс программирования включает в себя следующие этапы:
- Наблюдение за встроенными датчиками робота. Все данные, полученные на этом тапе, впоследствии станут вводными, которые робот получит для исполнения тех или иных задач.
- Оценка состояния системы. С помощью вводных данных, полученных на этапе наблюдения, описываются основные характеристики робота: его скорость движения, ориентация и др.
- Построение моделей и создание прогнозов. Представляет собой динамическую работу с периодической помощью в отношении модели робота и оценки его состояния.
- Планирование. Именно на этом этапе определяется палитра действий, необходимая для эффективного исполнения поставленной задачи
- Управление. Этап заключается в преобразовании команд и возможности модифицировать программы для управления переводом робота.
Биологический подход
Искусственный интеллект и нейронные сети все чаще применяются в робототехнике. На сегодняшний день эти технологии призваны имитировать биологическую нейронную (синаптическую) мозговую активность человека. В 2016 году эта технология позволила воплотить в жизнь возможность схватывания. Это позволило обучать роботов так же, как ответственные хозяева учат командам своих домашних питомцев.
Биологический подход во многом противоречит традиционному конвейерному, но уже демонстрирует собственные достойные результаты.
Смешанные подходы
Сочетают в себе положительный опыт конвейерного и биологического подходов, при котором технологии совмещаются. Роботы, запрограммированные таким способом, отличаются более высокими показателями, чем классические.
Полезное для программистов
Советы
При программировании роботов важно следовать следующим рекомендациям:
- При написании кода следите за тем, чтобы его сегменты были управляемыми. Программируя, вы постепенно создаете собственную библиотеку, где при необходимости будет легко найти нужный кусок кода и вставить в текущую программу, сэкономив время, потраченное на разработку.
- Включайте в код собственные комментарии, документируйте процесс. Чем опытнее программист, тем меньше комментариев он оставляет в коде. На начальном уровне рекомендуется оставлять сопутствующие комментарии практически к каждой строке.
- Регулярно сохраняйте текущие версии кода во время его написания. Не стоит перезаписывать один и тот же файл. В случае ошибки вы сможете вернуться в более ранней версии и добавлять изменения по мере необходимости. В противном случае ошибку придется искать по всему тексту.
- При осуществлении отладочных работ с роботом обязательно приподнимите его. Необходимо добиться того, чтобы его гусеницы, колеса и другие части не касались поверхности пола или земли. В таком случае робот не сможет себе навредить в случае неправильной работы программы. Обратите внимание также на то, чтобы кнопка отключения питания не была закрыта деталями и являлась легкодоступной. Это позволит быстро отключить устройство в случае необходимости.
- Если программа составлена таким образом, что код кажется неработоспособным, отключите питание робота. Чаще всего проблема кроется в необходимости корректировки и не сможет исчезнуть сама по себе. За это время, если устройство не будет обесточено, может повредиться часть механических узлов робота.
Написание программного кода – важнейшая часть создания робота. Без правильно составленной программы механизм не сможет проявить себя и эффективно выполнять те функции, на которые технически способен. Программирование роботов несколько отличается от обычного создания программ. Отличие заключается в том, что программист составляет обычный код, а программист-робототехник должен дополнительно взаимодействовать с механикой, электроникой и реальностью, окружающей его.
ABB делает программирование роботов проще с помощью Wizard Easy Programming

Программа Wizard Easy Programming от ABB позволяет начинающим специалистам по робототехнике без специального обучения устанавливать, программировать и использовать роботов, делая их более доступными для решения задач по автоматизации процессов.
Wizard Easy Programming – это метод графического программирования, который позволяет пользователям быстро создавать прикладные роботизированные программы для однорукого коллаборативного робота YuMi от компании ABB, не имея специального обучения.
Это простое ПО построено на концепции Blockly, метода визуального кодирования с открытым исходным кодом, который представляет язык программирования или код как взаимосвязанные блоки. Используя этот упрощенный подход, программа позволяет пользователям программировать и использовать робот YuMi с одним манипулятором без предварительного знания какого-либо языка программирования. Пользователь может просто перетащить мышкой эти функции на пульт FlexPendant, сразу увидеть результат и настроить действия робота за несколько секунд.
Благодаря возможностям Wizard использование робота YuMi с одним манипулятором становится простым, как никогда. Программное обеспечение включает в себя основные робототехнические функции, такие как «переместить», «взять» и «вакуум», охватывающие широкий спектр стандартных задач для робота. Есть также функции обработки ошибок, позволяющие начинающим программистам разобрать и устранить погрешности, например, столкновения. Упрощая обычно сложное программирование, связанное с обработкой ошибок, Easy Programming Wizard может помочь любому пользователю разработать высокоэффективные программы для роботов.
«Гибкие и простые в использовании, коллаборативные роботы дают малым предприятиям по всему миру возможность использовать преимущества робототехники, – отметила Энди Чжан, глобальный менеджер по коллаборативной робототехнике ABB. – Предоставление тем, кто впервые работает с роботом, возможности попробовать себя в автоматизации, позволяет сократить время обучения новых пользователей за счет упрощения программирования однорукого кобота YuMi с помощью нашего нового инструмента Wizard. Это поможет сократить затраты и время, необходимые для внедрения автоматизации на самых разных производственных линиях, которым может не хватать специального ресурса для программирования или автоматизации».
В отличие от других типов программного обеспечения Easy Programming Wizard в реальном времени преобразуется в язык программирования RAPID от компании ABB, что дает Wizard Easy Programming преимущество поддержки расширенного функционала робота. Сложное программирование робота, такое как задачи по сборку, может быть выполнено опытными робототехниками, а затем конвертировано в Wizard Easy Programming для начинающих специалистов для использования.
Wizard Easy Programming доступен с марта 2020 года в виде предустановленного приложения на устройстве FlexPendant для всех новых роботов YuMi с одним манипулятором. Программное обеспечение для простого программирования Wizard распространяется бесплатно, новое программное обеспечение смогут также получить существующие пользователи YuMi в виде бесплатной надстройки, установив ее на FlexPendant через RobotStudio.