Логические элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ
Следующая группа микросхем на пути усложнения компонентов цифровой электроники — это элементы, выполняющие простейшие логические функции. Объединяет все эти элементы то, что у них есть несколько равноправных входов (от 2 до 12) и один выход, сигнал на котором определяется комбинацией входных сигналов.
Самые распространенные логические функции, выполняемые такими элементами, — это И (в отечественной системе обозначений микросхем — ЛИ), И-НЕ (обозначается ЛА), ИЛИ (обозначается ЛЛ) и ИЛИ-НЕ (обозначается ЛЛ). Присутствие слова НЕ в названии элемента обозначает только одно — встроенную инверсию сигнала. В международной системе обозначений используются следующие сокращения: AND — функция И, NAND — функция И-НЕ, OR — функция ИЛИ, NOR — функция ИЛИ-НЕ.
Название самих функций И и ИЛИ говорит о том, при каком условии на входах появляется сигнал на выходе. При этом важно помнить, что речь в данном случае идет о положительной логике, о положительных, единичных сигналах на входах и на выходе.
Таблица 2.4. Таблица истинности двухвходовых элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ
Элемент И формирует на выходе единицу тогда и только тогда, когда на всех его входах (и на первом, и на втором, и на третьем и т. д.) присутствуют единицы. Если речь идет об элементе И-НЕ, то на выходе формируется нуль, когда на всех входах единицы (табл. 2.4). Цифра перед названием функции говорит о количестве входов элемента. Например, 8И-НЕ — это восьмивходовой элемент И с инверсией на выходе.
| Элемент ИЛИ формирует на выходе нуль тогда и только тогда, когда хотя бы на одном из входов присутствует единица |
(или на первом, или на втором, или на третьем и т. д.). Элемент ИЛИ-НЕ дает на выходе нуль при наличии хотя бы на одном из входов единицы (табл. 2.4). Пример обозначения: 4ИЛИ-НЕ — четырехвходовой элемент ИЛИ с инверсией на выходе.

Рис. 2.15. Обозначения элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ: зарубежные (слева) и отечественные (справа).
Отечественные и зарубежные обозначения на схемах двухвхо-довых элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ показаны на рис. 2.15. Все эти элементы бывают с выходами типа 2С, ОК и ЗС. В последнем случае обязательно имеется вход разрешения -EZ.
Нетрудно заметить (см. табл. 2.4), что в случае отрицательной логики, при нулевых входных и выходных сигналах, элемент И выполняет функцию ИЛИ, то есть на выходе будет нуль в случае, когда хотя бы на одном из входов нуль. А элемент ИЛИ при отрицательной логике выполняет функцию И, то есть на выходе будет нуль только тогда, когда на всех входах присутствуют нули. А так как в реальных электронных устройствах сигналы могут быть любой полярности (как положительные, так и отрицательные), то надо всегда очень аккуратно выбирать требуемый в каждом конкретном случае элемент. Особенно важно помнить об этом тогда, когда последовательно соединяются несколько разноименных логических элементов с инверсией и без нее для получения сложной функции.
Поэтому разработчику далеко не всегда удобно рассматривать элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ именно как выполняющие указанные в их названии логические функции. Иногда их удобнее рассматривать как элементы разрешения/запрещения или смешивания/совпадения. Но сначала мы рассмотрим случаи реализации на этих элементах именно логических функций.
На рис. 2.16 приведены примеры формирования элементами выходных сигналов на основании требуемых временных диаграмм входных и выходных сигналов. В случае а выходной сигнал должен быть равен единице при двух единичных входных сигналах, следовательно, нужен элемент 2И. В случае б выходной сигнал должен быть равен нулю, когда хотя бы один из входных сигналов равен единице, следовательно, требуется элемент 2ИЛИ-НЕ. Наконец, в случае в выходной сигнал должен быть равен нулю при одновременном приходе единичного сигнала Вх.1, нулевого сигнала Вх.2 и единичного сигнала Вх.З. Следовательно, требуется элемент ЗИ-НЕ, причем сигнал Вх.2 надо предварительно проинвертировать.

Рис. 2.16. Примеры применения элементов И и ИЛИ.
Любой из логических элементов рассматриваемой группы можно рассматривать как управляемый пропускатель входного сигнала (с инверсией или без нее).
Например, в случае элемента 2И-НЕ один из входов можно считать информационным, а другой — управляющим. В этом случае при единице на управляющем входе выходной сигнал будет равен проинвертированному входному сигналу, а при нуле на управляющем входе выходной сигнал будет постоянно равен единице, то есть прохождение входного сигнала будет запрещено. Элементы 2И-НЕ с выходом ОК часто используют именно в качестве управляемых буферов для работы на мультиплексированную или двунаправленную линию.

Точно так же в качестве элемента разрешения/запрещения могут применяться элементы И, ИЛИ, ИЛИ-НЕ (рис. 2.17). Разница между элементами состоит только в полярности управляющего сигнала, в инверсии (или ее отсутствии) входного сигнала, а также в уровне выходного сигнала (нуль или единица) при запрещении прохождения входного сигнала.
Рис. 2.17. Разрешение/запрещение прохождения сигналов на элементах И, И-НЕ, ИЛИ, ИЛИ-НЕ.

Рис. 2.18. Появление лишнего фронта при запрещении входного сигнала.
При использовании элементов разрешения/запрещения могут возникнуть дополнительные проблемы в случае, когда сигнал с выхода элемента идет на вход, реагирующий на фронт сигнала. В момент перехода из состояния разрешения в состояние запрещения и из состояния запрещения в состояние разрешения в выходном сигнале может появиться дополнительный фронт, никак не связанный с входным сигналом (рис. 2.18). Чтобы этого не произошло, надо придерживаться следующего простого правила: если вход реагирует на положительный фронт, то в состоянии запрещения на выходе элемента долженбыть нуль и наоборот.
Иногда необходимо реализовать функцию смешивания двух сигналов той или иной полярности. То есть выходной сигнал должен вырабатываться как при приходе одного входного сигнала, так и приходе другого входного сигнала. Если оба входных сигнала положительные и выходной сигнал положительный, то мы имеем в чистом виде функцию ИЛИ, и требуется элемент 2ИЛИ. Однако при отрицательных входных сигналах и отрицательном выходном сигнале для такого же смешивания
Применение логических элементов 69
понадобится уже элемент 2И. А если полярность входных сигналов не совпадает с нужной полярностью выходного сигнала, то нужны уже элементы с инверсией (И-НЕ при положительных выходных сигналах и ИЛИ-НЕ при отрицательных выходных сигналах). На рис. 2.19 показаны варианты смешивания на разных элементах.


Рис. 2.19. Реализация смешивания двух сигналов.
Наконец, элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ иногда бывает удобно рассматривать в качестве схем совпадения различных сигналов. То есть выходной сигнал должен вырабатываться тогда, когда сигналы на входах совпадают (приходят одновременно). Если же совпадения нет, то выходной сигнал должен отсутствовать. На рис. 2.20 показаны варианты таких схем совпадения на четырех разных элементах. Различаются они полярностями входных сигналов, а также наличием или отсутствием инверсии выходного сигнала.

Рис. 2.20. Схемы совпадения двух сигналов.
Рассмотрим два примера совместного использования элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ (рис. 2.21).

Рис. 2.21. Примеры совместного использования элементов.
Пусть необходимо смешать два сигнала, каждый из которых может быть разрешен или запрещен. Пусть полярность входных сигналов и сигналов разрешения положительная, а выходной сигнал должен быть отрицательным. В этом случае надо взять два двухвходовых элемента И и смешать их выходные сигналы с помощью двухвходового элемента ИЛИ-НЕ (а).
Пусть необходимо смешать два отрицательных сигнала и один положительный сигнал, причем результирующий сигнал может быть разрешен или запрещен. Полярность сигнала разрешения — отрицательная, полярность выходного сигнала — отрицательная. Для этого нужно взять трехвходовой элемент И, инвертор для отрицательного входного сигнала и двухвходовой элемент ИЛИ (б).
Элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ могут использоваться также в качестве инверторов или повторителей (рис. 2.22), для чего необходимо объединить их входы или на неиспользуемые входы подать сигнал нужного уровня. Второе предпочтительнее, так как объединение входов не только увеличивает входной ток, но и несколько снижает быстродействие элементов.

Рис. 2.22. Инверторы и повторители.

Рис. 2.23. Объединение по И входов микросхем.
По функции И часто объединяются входы более сложных микросхем. То есть какая-то функция выполняется только тогда, когда на все объединенные по И входы поступают сигналы нужной полярности. Чаще всего по И объединяются входы выбора микросхемы CS и входы управления третьим состоянием выхода микросхемы EZ. На рис. 2.23 показано три примера такого объединения по И. При этом надо учитывать, что на инверсные входы для выполнения функции должны поступать нулевые сигналы, а на прямые входы — единичные сигналы. Примерами могут служить микросхемы КР556РТ4, КР556РТ5, КР1533АП14, КР1533АП15.
До сих пор, рассматривая элементы И, И-НЕ, ИЛИ, ИЛИ-НЕ, мы не выходили за рамки первого уровня представления (логической модели). Это вполне допустимо в том случае, когда входные сигналы элементов не меняются одновременно или почти одновременно, когда их фронты разнесены во времени существенно (больше, чем на время задержки элемента). При одновременном изменении входных сигналов все будет гораздо сложнее, необходимо привлекать второй, а иногда и третий уровень представления. В момент изменения входных сигналов выходной сигнал становится неопределенным, нестабильным, непредсказуемым. В результате этого при неправильном проектировании может не работать вся сложная схема, целый прибор или даже большая система.
Например, возьмем логический элемент 2И-НЕ. Пусть на его входы приходят сигналы, изменяющиеся одновременно, причем в противофазе, то есть один переключается из нуля в единицу, а другой — из единицы в нуль. Пусть по тем или иным причинам (вследствие передачи по проводам, вследствие разных задержек элементов и т. д.) один из сигналов чуть-чуть сдвинулся во времени относительно другого (рис. 2.24). При этом на двух входах в течение кратковременного периода будет присутствовать два единичных сигнала. В результате выход начнет переключаться из единицы в нуль. Он может успеть переключиться, и тогда сформируется короткий импульс. Он может не успеть переключиться, и тогда импульса не будет. Он может иногда успевать переключиться, а иногда не успевать, и тогда выходной импульс то будет появляться, то не будет. Здесь все зависит от быстродействия элемента и величины задержки. Последняя ситуация наиболее неприятна, так как может вызвать нестабильную неисправность, выявить которую крайне сложно.

Рис. 2.24. Короткий импульс на выходе элемента 2И-НЕ.
На этапе проектирования схемы бороться с такими паразитными импульсами довольно просто: достаточно выбрать такое схемотехническое решение, при котором вся дальнейшая схема просто не реагировала бы на эти импульсы, например отключалась на некоторое время после изменения входных сигналов элементов. То есть необходимо временное согласование, синхронизация различных элементов схемы.
В качестве примера рассмотрим одно из самых распространенных применений рассматриваемых элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ — селектирование кодов. Суть селектирования сводится к следующему. Пусть имеется некоторая шина, по которой передаются коды. Необходимо выявить появление на этой шине какого-то определенного кода, то есть сформировать выходной сигнал, соответствующий требуемому входному коду.
Схема, выполняющая такую функцию, довольно проста
(рис. 2.25). В ее основе — многовходовые элементы И-НЕ. При
этом сигналы, соответствующие разрядам кода, в которых
должны быть единицы, подаются на входы элементов И-НЕ не
посредственно. А сигналы, соответствующие разрядам кода, в
которых должны быть нули, подаются на входы элементов И-
НЕ через инверторы. Выходные сигналы элементов И-НЕ объе
диняются с помощью элемента ИЛИ-НЕ. В результате на выхо
де элемента ИЛИ-НЕ формируется сигнал Вых.1 в тот момент,
когда на входе присутствует нужный код.

Рис. 2.25. Селектирование кодов со стробированием.
Однако в момент установления нужного кода и в момент его снятия возникает период неопределенности, когда в выходном сигнале могут быть короткие паразитные импульсы. Это связано как с неодновременным приходом различных разрядов, так и с внутренними задержками нашей схемы. Более того, короткие паразитные импульсы могут возникать на выходе и в том случае, когда любой входной код меняется на любой другой входной код, даже если оба этих кода не селектируются нашей схемой. То есть любое изменение кода всегда сопровождается периодом неопределенности в сигнале Вых.1.
Как же добиться, чтобы выходной сигнал не имел паразитных импульсов, не имел периодов неопределенности? Для этого обычно используется стробирование или тактирование передаваемого кода. То есть помимо кода параллельно с ним передается стробирующий или тактирующий сигнал STR, задержанный во времени относительно кода. Активным этот сигнал становится тогда, когда все предыдущие переходные процессы уже завершены, все разряды кода установились в нужные уровни и схема, обрабатывающая код, тоже закончила свою работу. А пассивным этот сигнал становится до начала новых переходных процессов. Это называется вложенным циклом (то есть в нашем случае сигнал STR вложен в сигналы кода). В результате, если мы будем разрешать выходной сигнал нашей схемы Вых.1 таким сигналом STR с помощью элемента 2И-НЕ, то мы получим сигнал Вых.2, свободный от паразитных импульсов и периодов неопределенности.
Однако бывают случаи, когда указанная особенность элементов И, И-НЕ, ИЛИ, ИЛИ-НЕ формировать короткие импульсы при изменении входных сигналов оказывается очень полезной. Например, нам необходимо сформировать короткий импульс по положительному или отрицательному фронту имеющегося сигнала. Тогда этот сигнал инвертируют, специально задерживают с помощью цепочки элементов или емкости и подают исходный сигнал и задержанный сигнал на входы элемента (рис. 2.26).

Рис. 2.26. Формирователи коротких импульсов по фронту входного сигнала.
Импульс по положительному фронту входного сигнала формируется на элементе 2И или 2И-НЕ (а), а импульс по отрицательному фронту входного сигнала — на элементе 2ИЛИ или 2ИЛИ-НЕ (б). Если элемент с инверсией, то выходной импульс будет отрицательным, если без инверсии, то положительным. При указанной на схемах величине емкости длительность импульса получается около 50 не. Для увеличения длительности импульса надо увеличивать величину емкости или же количество инверторов в цепи задержки (при этом количество инверторов обязательно должно быть нечетным).
2.4. Логические элементы Исключающее ИЛИ
Элементы Исключающее ИЛИ (по-английски — Exclusive-OR) также можно было бы отнести к простейшим элементам, но функция, выполняемая ими несколько сложнее, чем в случае элемента И или элемента ИЛИ. Все входы элементов Исключающее ИЛИ равноправны, однако ни один из входов не может заблокировать другие входы, установив выходной сигнал к уровню единицы или нуля.
Под функцией Исключающим ИЛИ понимается следующее: единица на выходе появляется тогда, когда только на одном входе присутствует единица. Если единиц на входах две или больше, или если на всех входах нули, то на выходе будет нуль. Таблица истинности двухвходового элемента Исключающее ИЛИ приведена ниже (табл. 2.5). Обозначения, принятые в отечественных и зарубежных схемах, показаны на рис. 2.27. Надпись на отечественном обозначении элемента Исключающее ИЛИ «=1» как раз и обозначает, что выделяется ситуация, когда на входах одна и только одна единица.
Таблица 2.5. Таблица истинности элемента Исключающее ИЛИ
О развязке питания с примерами
Когда я участвовал в проведении конкурса 7400, я понял, что многим из представленных логических схем для надежной работы не хватает простейших защитных элементов. Одним из самых часто встречающихся недостатков конструкции было отсутствие блокировочных емкостей. Позже, прочитав статью о законе Мёрфи, я решил немного написать о развязке и блокировочных конденсаторах.
Как человек, которого можно назвать старожилом в области электроники, я познакомился с проблемой отсутствия развязки на собственном опыте. Свою первую высокоскоростную схему я собрал, будучи стажером в крупной фирме по производству электроники. Та схема, цифровой частотомер, была собрана на логике семейства 74Fxx и работала на частоте 11 МГц (по тем временам это считалось очень много). Это была плата размером 23 × 16 см (Double Eurocard), содержащая около 40 микросхем, соединенных монтажом накруткой (wire wrap). Когда пришло время ее включать, я увидел, что схема не работает, как надо, а выдает полную ерунду.
Проверив несколько раз сборку, я рассказал о проблеме своему руководителю, а он взглянул на плату и сказал: «Не хватает блокировочных конденсаторов. Поставь их на питание около каждой микросхемы, тогда и поговорим.» Совершенно растерянный, я сделал, как было сказано, и — о чудо! — все сразу заработало. Почему, казалось бы, ни на что не влияющая емкость заставила схему работать? Мой руководитель рассказал мне о бросках тока при переключении, об индуктивности проводников и о развязке. Я признаю, что прошло несколько лет, прежде чем я действительно понял, что он тогда говорил, но урок был усвоен: всегда ставить конденсаторы на питание цифровых микросхем.
Термины «блокировочный конденсатор» и «развязка» — не случайные слова, а имеют в данном контексте вполне определенное значение:
развязка — действие, направленное на (частичное) отделение цепей питания микросхемы от общего источника питания;
блокировочный конденсатор — конденсатор, установленный таким образом, что он шунтирует питание микросхемы и действует как местный источник питания.
Почему это всё так важно? Взгляните, например, сюда:
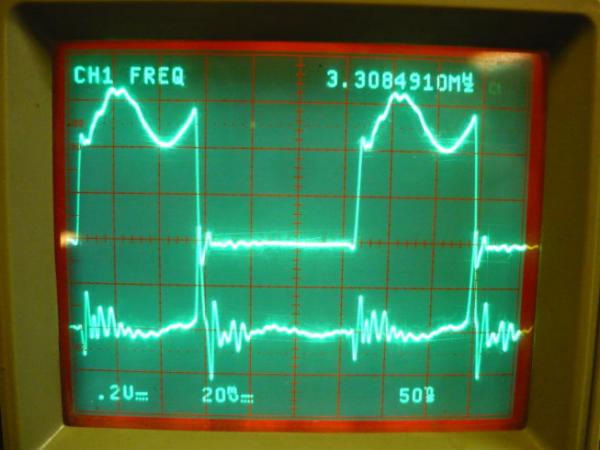
Рисунок 1. Отсутствие блокировочноых конденсаторов.
Разве это похоже на цифровой сигнал? Такую ерунду вы получите без блокировочных конденсаторов.
Пожалуйста, обратите внимание, что тактовая частота не важна. Проблема заключается в восходящих и спадающих фронтах сигнала. Так, одни и те же соображения применимы для систем, работающих на частоте 1 Гц, 20 кГц или 50 МГц. Используемые частоты в примерах ниже выбраны такими, чтобы их было удобно наблюдать на осциллографе.
Следует отметить, что на высокой частоте сбой наступает быстрее, чем на низкой, за счет большего числа фронтов в единицу времени. Однако это не означает, что низкочастотные схемы будут работать надежно. Это далеко не так, они будут сбоить так же легко, согласно закону Мёрфи. Да, и кстати, вы подумали о ваших маленьких микроконтроллерах, работающих на частоте 16 МГц?
Измерение всплесков тока
Чтобы увидеть, что происходит, нужно измерить токи, протекающие через схему. Вот простая экспериментальная установка, собранная для иллюстрации:
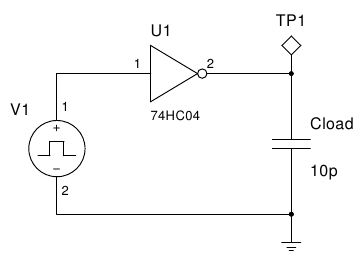
Рисунок 2. Подключение инвертора. 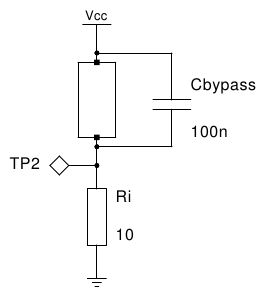
Рисунок 3. Измерительная схема.
Генератор импульсов подключен к инвертору 74HC04, нагруженному на емкость 10 пФ. Сигнал на выходе инвертора, TP1, показан на верхней осциллограмме. Источник питания подключен к выводам микросхемы 7 и 14. В разрыв земляного проводника включен токоизмерительный резистор 10 Ом.
Напряжение в точке TP2 пропорционально потребляемому микросхемой току и отображается на нижней осциллограмме. Блокировочный конденсатор может быть подключен или отключен при необходимости. Щупы осциллографа снабжены делителями 1:10, так что масштаб осциллограммы по вертикали нужно умножить на 10. Все неиспользуемые входы 74HC04 заземлены. Установка выглядит так:
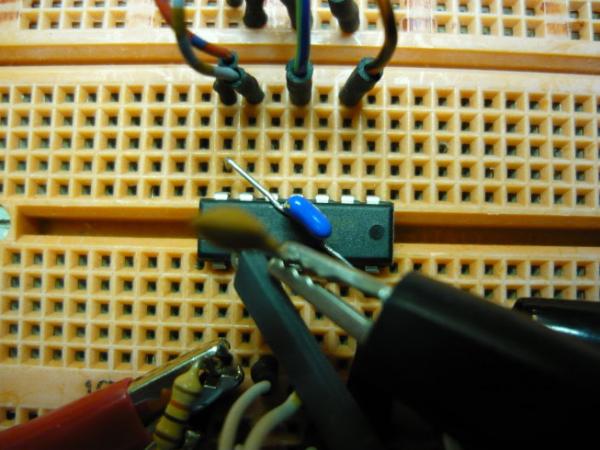
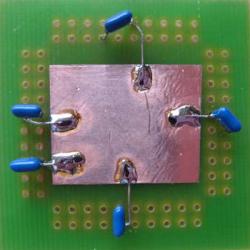
Рисунок 4. Установка, собраннная на макетной плате.
Рисунок 5 показывает проблемы, возникающие на высоких и низких частотах. Картинки слева — без блокировочного конденсатора, справа — с ним.
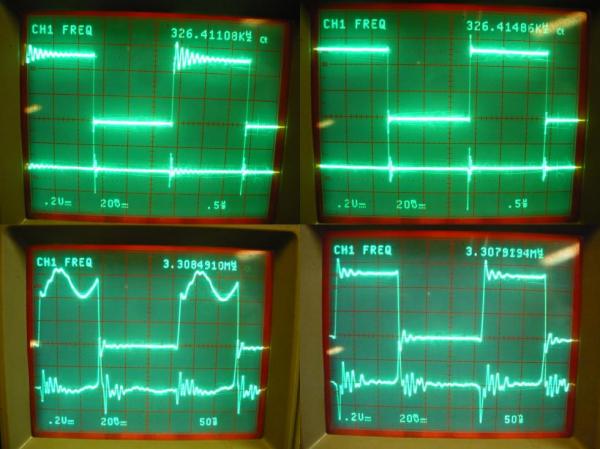
Рисунок 5. Выходное напряжение (верхний канал) и потребляемый ток (нижний канал).
Сверху — тактовая частота 330 кГц, снизу — 3,3 МГц.
Слева — без блокировочного конденсатора, справа — с ним.
- Измеренный ток — это только ток через ногу GND и блокировочный конденсатор. Он не в точности соответствует току, потребляемому микросхемой. Сложно измерять ток через ноги Vcc и GND одновременно (ограничения, накладываемые конструкцией осциллографа. — Прим. перев.). Однако, измерение тока через вывод GND достаточно для иллюстративных целей.
- При логической «1» на выходе наблюдается высокочастотный «звон». Его размах больше 2 В, и выбросы превосходят напряжение питания. Добавление блокировочного конденсатора снижает «звон» до практически несущественного уровня. Выброс все еще остается, но затухает гораздо быстрее
- Фронтам сигнала соответствуют выбросы («иголки») потребляемого тока. Добавление блокировочного конденсатора уменьшает эти выбросы и делает их симметричными при восходящем и спадающем фронтах. Диапазон выбросов от -22 до +45 мА без блокировочного конденсатора и от -32 до +36 мА — с ним.
- Симметричная форма тока при наличии блокировочного конденсатора говорит, что энергия запасается и извлекается обратно. Это очень важная особенность.
- Остаточный ВЧ звон во многом зависит от положения щупа осциллографа (не показано), что говорит о том, что схема содержит паразитные LC-элементы и радиочастотные антенны. Расположение на плате и взаимное положение соединительных проводов оказывает значительное влияние на амплитуду и частоту колебаний. Эти помехи не могут быть полностью устранены, но их можно сильно уменьшить, правильно разведя печатную плату.
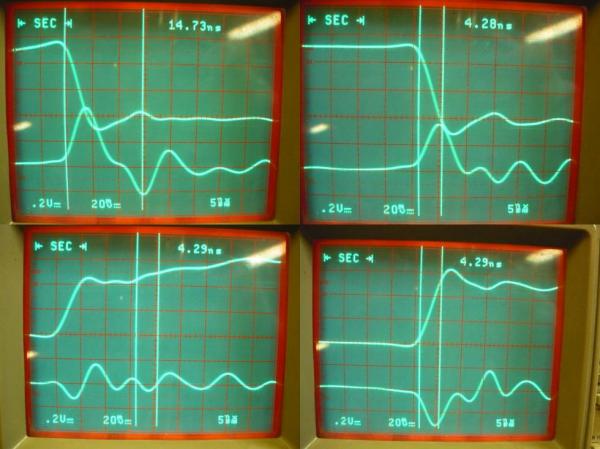
Рисунок 6. Фронты выходного напряжения (верхний канал) и потребляемого тока (нижний канал).
Сверху — задний (спадающий) фронт, снизу — передний (восходящий) фронт.
Слева — без блокировочного конденсатора, справа — с ним.
Оценка потребляемого тока
Микросхема 74HC04 выполнена по технологии КМОП. Это означает, что статический потребляемый ток близок к нулю. Ток потребляется только при переключениях из «0» в «1» и из «1» в «0». При переключении все нагрузочные и паразитные емкости должны быть перезаряжены. Для экспериментальной схемы нагрузка имеет емкость 10 пФ. Сюда нужно добавить емкости выводов и паразитные емкости, которые составляют примерно 5+2 пФ. Щуп осциллографа имеет емкость 10 пФ, которую тоже нужно учесть. Таким образом, суммарная емкость нагрузки на выходе инвертора примерно 27 пФ.
Выходную емкость нужно зарядить от 0 до 5 В примерно за 4,3 нс. Приняв для простоты, что зарядный ток постоянный, оценим его величину:
Q = I · t = C · U
I = (5 · 27 · 10 -12 )/(4,3 · 10 -9 ) = 31,4 мА
Это означает, что через выход инвертора при каждом переключении втекает или вытекает огромный (по меркам КМОП. — Прим. перев.) ток. Откуда черпается энергия на это? Конечно, из источника питания. На рисунке 6 хорошо видно, что ток не возникает мгновенно, а нарастает до определенного уровня, а затем падает снова. Такое поведение явно указывает на наличие индуктивных элементов.
Лучше всего это видно на рисунке 6 справа, где ток достигает максимума в тот момент, когда выходное напряжение падает до нуля. Затем ток падает, вызывая провал выходного напряжения. Расчетный ток достаточно хорошо совпадает с измеренным, учитывая, что была проведена лишь простейшая оценка.
Так зачем же нужен блокировочный конденсатор?
Еще раз внимательно взглянем на нижнюю половину рисунка 6. Слева выходное напряжение не доходит до 5 В в течение некоторого времени, а справа — достигает почти сразу. Без блокировочного конденсатора микросхеме не хватает мощности питания для формирования крутого фронта, и напряжение застревает на уровне 4 вольт. Блокировочный конденсатор выдает необходимую мгновенную мощность на некоторое время.
Блокировочный конденсатор примерно в 4000 раз больше, чем емкость нагрузки, значит, следует ожидать, что падение напряжения питания будет в 4000 раз ниже (чем размах выходного напряжения. — Прим. перев.) — порядка 1-2 мВ.
При обратном переключении, из «1» в «0», как на рисунке 6 сверху, блокировочный конденсатор выступает в роли резервуара для принятия выделившейся энергии. Емкость нагрузки разряжается, и ток должен стечь на землю. Тем не менее, энергия не может быть мгновенно передана в источник питания, и блокировочный конденсатор будет временно хранить ее.
Локальный источник питания
Основной источник питания не может обеспечить микросхему достаточной мощностью из-за индуктивности проводников. Каждый провод обладает паразитной индуктивностью, которая препятствует изменению тока. Из определения индуктивности:
U = L · dI / dt ⇒ dI = U · dt / L
Из этого уравнения видно, что изменение тока обратно пропорционально индуктивности. Иными словами, если возрастает индуктивность, становится труднее изменить ток за заданный промежуток времени, при прочих равных параметрах. Кроме того, изменение тока вызывает падение напряжения на индуктивности. Чем длиннее провод (или дорожка на плате) тем более высокую индуктивность он имеет, тем сильнее он сопротивляется быстрому изменению тока, и тем больше будет падение напряжения.
Блокировочный конденсатор является локальным накопителем энергии. Он всегда должен быть установлен как можно ближе к выводам питания микросхемы, чтобы свести к минимуму индуктивность проводников от конденсатора до микросхемы. Такая схема развязывает общие и локальные цепи питания.
Увеличиваем нагрузку
Микросхема состоит из шести инверторов, поэтому схему можно изменить так, чтобы увеличить потребляемый ток:

Рисунок 7. Экспериментальная схема с дополнительной нагрузкой.

Рисунок 8. Выходное напряжение (верхний канал) и потребляемый ток (нижний канал) для схемы с дополнительной нагрузкой.
Сверху — тактовая частота 330 кГц, снизу — 3,3 МГц.
Слева — без блокировочного конденсатора, справа — с ним.
Обратите внимание на другой масштаб по оси Y для канала измерения тока, по сравнению с рисунками 5 и 6.
Ток через вывод GND теперь имеет выбросы около 70 мА при отсутствии блокировочного конденсатора. Если же последний установлен, снова наблюдаем симметричную форму выбросов амплитудой ±50 мА при восходящих и спадающих фронтах.
Обратите внимание, что фронт сигнала, как видно на рисунке 8 внизу слева, теперь гораздо более пологий. Микросхеме просто-напросто не хватает энергии для быстрого переключения. Установка блокировочного конденсатора (рисунок 8 справа) восстанавливает крутизну фронта до приемлемого уровня.
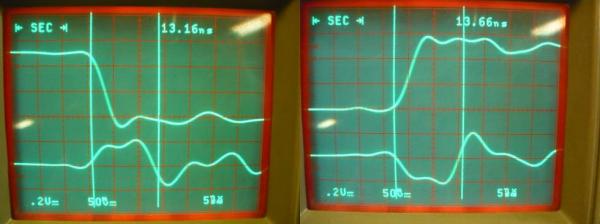
Рисунок 9. Фронты выходного напряжения (верхний канал) и потребляемого тока (нижний канал).
Слева — задний (спадающий) фронт, справа — передний (восходящий) фронт.
Блокировочный конденсатор установлен.
Подробное рассмотрение фронтов сигнала выявляет увеличенный по продолжительности выброс тока, что вызвано большими потребностями в энергии. Нагрузка микросхемы примерно в шесть раз выше, чем раньше (первый инвертор нагружен на входные емкости остальных инверторов, которые составляют 5 раз по 5 пФ).
Это был лишь простой пример — микросхема из шести инверторов. А теперь экстраполируйте вышесказанное на сложную логическую схему, содержащую множество элементов и множество внутренних соединений. В ней очень много паразитных емкостей, которые должны перезаряжаться при каждом изменении входных сигналов. Наконец, представьте себе микроконтроллер, состоящий из многих тысяч вентилей.
Заземление
Изложенные выше объяснения и иллюстрации должны дать ясное понимание того, что блокировочный конденсатор — важный элемент, выполняющий свою специальную функцию. Он запасает энергию источника питания локально, выдает её при необходимости, а также принимает избытки энергии.
Локальное хранилище энергии постоянно пополняется из основного источника питания через проводник Vcc. В то же время, избыточная энергия должна быть сброшена в источник питания через проводник GND. Сброс энергии в блокировочный конденсатор повышает напряжение на нем, и, по сути, кратковременно создает на схеме локальную область с другим потенциалом. Устранение этого дисбаланса является очень важным и осуществляется при помощи заземления. (Здесь под заземлением понимается не подключение к массе нашей планеты, а соединение с общим проводом источника питания. — Прим. перев.)
Печатные платы часто имеют отдельные заземленные слои, которые очень эффективны для соединения элементов с общим проводником источника питания. Хорошо проработанная разводка земли имеет первостепенное значение для сброса избыточной энергии. Но будьте осторожны, в сплошном заземленном слое могут возникать вихревые токи, а многочисленные связи с общим проводом — образовывать т.н. земляные петли.
Всегда будет хорошей идеей обратиться к знакомому разработчику со стажем. Большинство ошибок уже было кем-либо допушено раньше, и нет никакой необходимости повторять их до бесконечности.
- развязка
- decoupling
- блокировочный конденсатор
- bypass capacitor
- цифровая электроника
Основы схемотехнической реализации ЭВМ
Аннотация: Рассматриваются основные элементы, составляющие систему логических элементов, их схемотехническая реализация, статические и динамические параметры, порядок проектирования комбинационных схем на примере одноразрядного сумматора.
Системы логических элементов
Системой логических элементов называется функционально полный набор логических элементов, объединенных общими электрическими, конструктивными и технологическими параметрами и использующих одинаковый тип межэлементных связей [ 1 ] . Системы элементов содержат элементы для выполнения логических операций, запоминающие элементы, элементы, реализующие функции узлов ЭВМ, а также элементы для усиления, восстановления и формирования сигналов стандартной формы.
Условно-графические обозначения ( УГО ) некоторых логических элементов представлены на рис.13.1.
Рис. 13.1. Условно-графические обозначения логических элементов
УГО элемента представляет собой прямоугольник , к которому слева подходят входные сигналы, а справа выходят выходные. Внутри прямоугольника ставится условное обозначение выполняемой элементом логической функции. Если значение выходного сигнала принимает инверсное значение по отношению к обозначенной внутри элемента функции, то данный выход обозначается на УГО элемента кружком (рис.13.1,в – 13.1,д). Аналогично, если активным уровнем входного сигнала является логический «0» , то данный вход обозначается кружком (вход E элемента 13.1,ж ).
Если элемент выполняет сложную функцию, имеет несколько функционально различных групп входов и выходов, то входы и выходы отделяются от основного поля УГО вертикальными линиями. Внутри каждого из получившихся полей функционально различные группы входов и выходов отделяются друг от друга горизонтальными линиями. На рис.13.1,ж показан элемент, выход которого может находиться в одном из трех состояний: логический «0» , логическая «1» , состояние высокого сопротивления. В состоянии высокого сопротивления выход элемента отключается от входов всех других элементов, с которыми он связан. Вход E ( enable ) этого элемента управляет состоянием его выхода. Так как на условно-графическом обозначении этот вход отмечен кружком, то отсюда следует, что функция разрешения передачи двоичного сигнала с входа на выход элемента выполняется при состоянии логического «0» на входе разрешения E . Если на вход E подан сигнал логической «1» , то выход элемента находится в отключенном (так называемом «третьем» ) состоянии.
Каждый логический элемент – это электронно-техническое изделие (рис.13.2). В этих схемах все транзисторы работают в ключевом режиме. Это означает, что при подаче сигнала высокого уровня на базу транзистора, его сопротивление становится пренебрежимо малым, то есть транзистор как бы «стягивается в точку». При низком потенциале на базе транзистора сопротивление между коллектором и эмиттером становится чрезвычайно большим, что фактически означает разрыв цепи.
Рис. 13.2. Схемотехническая реализация логических элементов
Рассмотрим это на примере работы инвертора (рис.13.2,а). Если сигнал X имеет высокий потенциал , то ключ , реализованный на транзисторе, замкнут, и потенциал точки Y низкий. В противном случае связь между точкой Y и «землей» разорвана, и сигнал Y имеет высокий уровень, что и обеспечивает реализацию логической функции » отрицание «.
Для элемента «И-НЕ» сигнал в точке Y будет иметь низкий уровень ( НУ ) лишь тогда, когда оба сигнала X1 и X2 имеют высокий уровень ( ВУ ). Работа этого элемента описывается таблицей 13.1.
| X 1 | X 2 | Y |
|---|---|---|
| НУ | НУ | ВУ |
| НУ | ВУ | ВУ |
| ВУ | НУ | ВУ |
| ВУ | ВУ | НУ |
Если принять, как это делается в наиболее распространенных сериях логических элементов, высокий уровень сигнала за логическую «1», а низкий уровень — за логический «0», то получим таблицу истинности данного элемента (таблицей 13.2).
| X 1 | X 2 | Y |
|---|---|---|
| 0 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
Эта таблица соответствует логической функции «И-НЕ» .
В то же время, принимая высокий уровень сигнала за логический «0» , а низкий уровень – за логическую «1» , получим следующую таблицу истинности (табл. 13.3).
| X 1 | X 2 | Y |
|---|---|---|
| 1 | 1 | 0 |
| 1 | 0 | 0 |
| 0 | 1 | 0 |
| 0 | 0 | 1 |
Эта таблица соответствует уже функции «ИЛИ-НЕ» .
Таким образом, кодирование сигналов в системе логических элементов может влиять на выполняемую им логическую функцию. В дальнейшем будем полагать кодировку сигналов, принятую для табл. 13.2.
Для элемента «ИЛИ-НЕ» (см. рис.13.2) сигнал в точке Y будет иметь высокий уровень лишь тогда, когда оба сигнала X1 и X2 имеют низкий уровень. Работа этого элемента описывается табл. 13.4, а его таблица истинности при сделанных предположениях о кодировке сигнала – таблицей 13.5. Эта таблица соответствует логической функции «ИЛИ-НЕ» .
| X 1 | X 2 | Y |
|---|---|---|
| НУ | НУ | ВУ |
| НУ | ВУ | НУ |
| ВУ | НУ | НУ |
| ВУ | ВУ | НУ |
| X 1 | X 2 | Y |
|---|---|---|
| 0 | 0 | 1 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 0 |
Параметры элементов принято делить на статические и динамические [ 1 ] . Статические параметры инвариантны к переходным процессам и измеряются в статическом режиме. Динамические, наоборот, определяют реактивные свойства элемента и измеряются во время переходных процессов.
К статическим параметрам относятся токи, текущие по выводам схемы, и соответствующие напряжения. Отметим среди этих параметров следующие:
- ток потребления;
- напряжение источника питания;
- пороговое напряжение низкого уровня ( U 0 );
- пороговое напряжение высокого уровня ( U 1 );
- потребляемая мощность;
- нагрузочная способность;
- помехоустойчивость.
Среди многочисленных динамических параметров , характеризующих схему, выделим следующие:
- время перехода при включении ( t 10 ) (задний фронт);
- время перехода при выключении ( t 01 ) (передний фронт);
- время задержки распространения при включении ( tзд 01 );
- время задержки распространения при выключении ( tзд 10 );
- среднее время задержки распространения ( tзд ср ) – интервал времени, равный полусумме времен задержки распространения сигнала при включении и при выключении; в дальнейшем это время будем называть временем задержки элемента ( tзд ).
Проиллюстрируем некоторые статические и динамические параметры логических схем на примере работы элемента «НЕ» (см. рис. 13.2,а). Временная диаграмма входного и выходного сигналов этого элемента, на которой отмечены его статические и динамические параметры , приведена на рис. 13.3.
Обрыв цепи ГРМ: причины неисправности и последствия для двигателя
Один из видов привода ГРМ в двигателях внутреннего сгорания — это цепь, которая движется по зубчатому колесу коленчатого вала, приводя в движение зубчатые колеса распредвалов. В зависимости от типа двигателя и ряда других факторов, например частоты вращения коленчатого вала, разрыв цепи ГРМ может оказать негативное влияние на работу автомобиля и привести к серьезным последствиям, вплоть до дорогостоящего ремонта двигателя.
В цепном приводе к дополнительным элементам, ответственным за его правильную работу, относятся направляющие (или так называемые успокоители) и гидравлические натяжители. Они призваны повысить эффективность работы двигателя и предотвратить такие последствия износа цепи, как смещение фаз. Система ГРМ — это сеть взаимосвязанных компонентов, поэтому выход из строя одной детали может представлять большую опасность и повлечь за собой неисправность других. В отличие от ремня ГРМ, который может внезапно выйти из строя, если его не заменить в срок, установленный изготовителем транспортного средства, неисправность цепи проявляется гораздо раньше.
«Разрыв цепи ГРМ может привести к повреждению клапанов, поршней, искривлению направляющих, шатунов, распредвалов и даже повреждению головки блока цилиндров двигателя. Все зависит от того, исключен ли в двигателе риск столкновения поршней с клапанами — в ряде агрегатов отсутствие синхронизации в работе ГРМ не приводит к их столкновению. Размер ущерба зависит не только от конструкции блока, но и от частоты вращения коленвала в момент обрыва привода ГРМ. Как правило, чем выше обороты, тем серьезнее повреждение», — объясняет Томаш Охман из компании SKF.
Разрыву цепи — если он не вызван заводским дефектом — предшествует ее чрезмерный износ. Признаки такой неисправности мы распознаем в первую очередь по слишком громкой работе ГРМ на непрогретом двигателе. Звук, который в этом случае сопровождает работу двигателя, напоминает треск или стук, причиной которого, как правило, служит неисправный натяжитель или чрезмерное растяжение цепи, которое нормально работающий натяжитель не в состоянии компенсировать. Это может привести к ударам цепи о корпус, который ее защищает, или об успокоитель. Интенсивность звучания увеличивается вместе с увеличением оборотов коленвала двигателя. Чтобы проверить это, необходимо несколько раз нажать на педаль газа. После прогрева блока до рабочей температуры звук может немного ослабнуть.
Растяжение цепи также может привести к смещению фаз газораспределения, что проявляется в неровной работе двигателя, слабой реакции на добавление газа, а также в более высоком, чем обычно, расходе топлива. Разрыв чрезмерно изношенной цепи происходит обычно в момент ее натяжения, например, при увеличении оборотов на движущемся на подъем автомобиле. Изношенная цепь может разорваться и в случае буксировки автомобилем прицепа большой массы, который создает высокую нагрузку на двигатель и систему передачи крутящего момента. Как же обслуживать цепной привод, чтобы предотвратить возникновение подобных ситуаций?
При выполнении монтажа автомастерские должны помнить о необходимости устанавливать блокировки распредвалов или коленвала (либо и того, и другого одновременно), предназначенные для данной модели двигателя. Установка неподходящего типа блокировки может привести к смещению фаз газораспределения, а также к возникновению в памяти ЭБУ ошибок, относящихся к положению распредвалов и коленчатого вала. В этом случае двигатель будет работать неправильно, а цепь изнашиваться значительно быстрее.
«Большинство цепей ГРМ требует постоянного смазывания, так как они работают в моторном масле, которое питает также гидравлические натяжители. В связи с этим исправность ГРМ напрямую зависит от качества и чистоты масла. Еще один ключевой момент — это использование проверенных запчастей. Например, продукции компании SKF — в состав наших комплектов входят цепь, натяжители, успокоители, шкивы, подшипники скольжения и все необходимые уплотнения и крепёж, что позволяет выполнить комплексную замену с помощью продукции одной компании, без необходимости заказа дополнительных элементов», — резюмирует Томаш Охман.