Магнитный подшипник на постоянных магнитах
Пассивные магнитные подшипники (подвесы) на постоянных магнитах
Теорема (запрет) Ирншоу
В системе тел, взаимодействующих посредством полей, потенциал которых изменяется обратно пропорционально расстоянию от источника, и не способных к изотропному вытеснению полей взаимодействия из занимаемого пространства, устойчивое равновесие невозможно.
К полям, потенциал которых убывает пропорционально расстоянию от источника, относятся, в частности, гравитационное, магнитостатическое и электростатическое поле. Чтобы получить устойчивое равновесие в таких полях, необходимо сконструировать систему с минимумом потенциальной энергии в точке равновесия, т. е. создать в некоторой области пространства вокруг этой точки «потенциальную яму». Для этого можно использовать неоднородные среды, а также материалы, относительная диэлектрическая или относительная магнитная проницаемость которых меньше, чем у окружающей их среды. Если окружающей средой является воздух (вакуум), то устойчивое равновесие можно получить только в магнитостатическом поле, используя диамагнетики или сверхпроводники. Однако, поскольку относительная магнитная проницаемость известных диамагнетиков мало отличается от единицы, то и сила, возвращающая тело к положению равновесия, будет невелика. А использование сверхпроводящих материалов ограничено необходимостью их существенного охлаждения. Поэтому в практических конструкциях магнитных подшипников на постоянных магнитах имеется, как правило, хотя бы одна степень свободы, в направлении которой равновесие невозможно.
Схемы пассивных магнитных подшипников
Радиальные магнитные подшипники на постоянных магнитах
Рис. 1. Радиальные магнитные подшипники из цилиндрических и кольцевых магнитов, намагниченных аксиально.
Рис. 2. Радиальные магнитные подшипники из цилиндрических и кольцевых магнитов, намагниченных радиально.
Все радиальные магнитные подшипники имеют поперечную (радиальную) жесткость и неустойчивы в осевом направлении.
Аксиальные магнитные подшипники на постоянных магнитах
Рис. 3. Аксиальные магнитные подшипники из цилиндрических и кольцевых магнитов, намагниченных аксиально.
Рис. 4. Аксиальные магнитные подшипники из цилиндрических и кольцевых магнитов, намагниченных радиально.
Все аксиальные магнитные подшипники имеют продольную (осевую) жесткость и неустойчивы в радиальном направлении.
Примеры конструкций
На рис. 5 показан макет устройства, состоящего из вала с двумя пассивными радиальными магнитными подшипниками.


Рис. 5. Макет устройства с двумя пассивными радиальными магнитными подшипниками.
Каждый из подшипников состоит из двух постоянных магнитов — наружного кольцевого и внутреннего цилиндрического, намагниченных аксиально (схема 3 рис. 1). Для того, чтобы обеспечить устойчивость вала в осевом направлении, использована шаровая опора. С помощью регулировочного винта можно выставлять положение магнитов друг относительно друга таким образом, чтобы максимально уменьшить нагрузку на опору и снизить момент трения.
Намагничивание постоянных магнитов осуществлялось в установках намагничивания [5].
Ссылки:
- Eric Maslen. Magnetic Bearings. University of Virginia, Department of Mechanical, Aerospace and Nuclear Engineering, Charlottesville, Virginia, 2000.
- Журавлев Ю. Н. Активные магнитные подшипники: Теория, расчет, применение. — СПб.: Политехника, 2003. — 206 с.: ил.
- Магнитные подшипники и подвесы
- Постоянные магниты: Справочник / Альтман А. Б., Герберг А. Н., Гладышев П. А. и др.; Под ред. Ю. М. Пятина. — 2-е изд., перераб. и доп. — М.: Энергия, 1980. — 488 с., ил.
- Установки импульсного намагничивания и размагничивания постоянных магнитов
- Аксиальный подшипник — осесимметричный подшипник, создающий противодействие продольным (осевым) нагрузкам.
- Ирншоу теорема (запрет) — правило невозможности устойчивого равновесия в системе тел, взаимодействующих посредством полей, потенциал которых изменяется обратно пропорционально расстоянию от источника, и не способных к изотропному вытеснению полей взаимодействия из занимаемого пространства.
- Магнитный подвес — устройство для разгрузки опоры, действующее за счет сил магнитного притяжения или отталкивания.
- Магнитный подшипник — подшипник, принцип работы которого основан на использовании сил магнитного притяжения или отталкивания.
- Подшипник — узел, соединяющий отдельные элементы конструкции, обеспечивающий им некоторое количество степеней свободы друг относительно друга.
- Радиальный подшипник — осесимметричный подшипник, создающий противодействие поперечным (радиальным) нагрузкам.
Магнитный подшипник. Устройство и работа. Плюсы и минусы

Магнитный подшипник или бесконтактный подвес – это уникальное изобретение, позволившее избавиться от множества проблем, касающихся вращающихся частей механизмов. Благодаря его внедрению удается обойтись без смазки, которая необходима для работы подшипниковых узлов контактного типа. Последнее объясняется тем, что трущиеся части в бесконтактном подвесе полностью отсутствуют.
Чем привлекателен магнитный подшипник
Этот элемент вращающихся бесконтактных узлов привлекает внимание инженеров-разработчиков целым рядом достоинств. К ним относятся:
- Экономичность (нет необходимости в смазке и частой замене изделий).
- Отсутствие потерь на трение и вибрации.
- Низкий уровень потребления при работе в составе электрооборудования.
- Возможность получения высокой скорости вращения.
При использовании таких подшипников в механический узел удается интегрировать элементы автоматики, контролирующие их состояние и герметичность.
Все перечисленные достоинства позволяют утверждать, что магнитный подшипник оптимально подходит для использования в различных устройствах и механизмах. Конструктивно эти изделия подразделяются на два типа: пассивные и активные. Первые изготавливаются на основе постоянных магнитов, а вторых для образования магнитного поля используются сердечники с протекающим по ним переменным током.
Пассивные бесконтактные подвесы применяются крайне редко, что объясняется низкой надежностью данного варианта исполнения. Более перспективными подшипниками считаются изделия активного типа, открывающие широкие возможности для усовершенствования магнитных систем.
Как действует активный магнитный подшипник
Действие активного магнитного подвеса основано на эффекте левитации (зависания предметов в пространстве). При этом вал с центральной частью подшипника вращается без непосредственного контакта с опорной частью конструкции. При таком устройстве вращающегося узла необходимость в применении смазки полностью отпадает.

В эффекте зависания особое значение придается устойчивости пространственной позиции вала ротора. Входящие в систему датчики постоянно отслеживают его положение и формируют сигналы, поступающие на узел автоматического контроля. С его помощью осуществляется корректировка позиционирующего поля статора. При этом сила магнитного воздействия уменьшается или увеличивается с нужной стороны вала, способствуя поддержанию устойчивого положения роторной части.

С помощью двух конических подшипников активного типа, например, удается надежно «подвесить» ротор в воздухе, обеспечивая его устойчивое бесконтактное вращение. Система управления такой конструкцией, которая может быть аналоговой или цифровой, непрерывно отслеживает положение оси. Благодаря встроенному модулю контроля, удается обеспечить мягкость скольжения «подвешенного» узла, а также существенно повысить его нагрузочную способность.
Такая технология привлекательна также тем, что магнитный подшипник может работать в широком диапазоне температур, обходясь совсем без атмосферного воздуха (то есть в вакууме). Благодаря отсутствию трения удается достичь огромных скоростей вращения вала двигателей и других подвижных узлов различных механизмов.
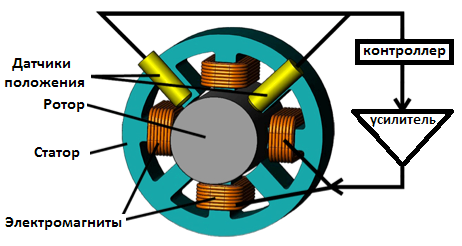
Устройство бесконтактного магнитного подшипника активного типа
Из описания работы активного подвеса становится понятным, что к основным его составляющим относятся сам магнитный подшипник, а также автоматическая система электронного слежения (САУ). Входящие в ее состав электромагниты постоянно воздействуют на ротор с помощью корректирующих сигналов, поступающих от системы контроля.
Возможность управления достигается за счет того, что в ротор радиального подшипника при его изготовлении встраиваются специальные ферромагнитные пластины. Благодаря этому, этот узел становится активным, то есть способным реагировать на удерживающее поле катушек статора.
Одновременно с этим расположенные рядом индуктивные датчики постоянно отслеживают положение ротора. Любое отклонение от заданной позиции вызывает появление корректирующего сигнала, который подается на специальное электронное устройство (контроллер). С его помощью вырабатываются управляющие воздействия, возвращающие ротор в устойчивое положение.
Для нормального функционирования этой системы радиальный зазор между ее подвижной и неподвижной частью должен составлять от 0,5 до 1 мм.
Точно таким же образом работает магнитный подшипник упорного типа. В его конструкции используются кольцеобразные электромагниты, закрепленные на валу опорного диска с размещенными на его концах датчиками. Точно такие же элементы располагаются на неподвижном статоре системы.
Для удержания ротора во время остановки или во внештатной ситуации в конструкцию системы добавлены шариковые подшипники. Они закрепляются в ней таким образом, чтобы образующийся рабочий зазор составлял половину значения, выбранного для магнитного подвеса.
Преимущества и недостатки активной системы опорного типа
К бесспорным достоинствам активной системы, состоящей из опорных магнитных подвесов, относят:
- Повышенная износостойкость всех элементов рабочего узла.
- Допустимость работы в любых агрессивных средах.
- Возможность использования при сверхвысоких или сверхнизких температурах (в космических условиях, в частности).
Недостатки этого способа организации бесконтактного подвеса заключаются в необходимости в дополнительном использовании механических подшипников, начинающих работать при пропадании магнитного поля.
В качестве страховочных опор для вращающегося ротора чаще всего применяются подшипники качения. Они выдерживают не более 2-х или 3-х типичных аварийных ситуаций, после чего подлежат полной замене. К недостаткам этого способа также относят необходимость в точном позиционировании ротора подвеса с помощью достаточно сложной электронной системы управления. Добавим к этому нагревание обмотки статора подшипника при прохождении через нее электрического тока. Для эффективного отвода излишков тепла в системе приходится предусматривать специальные элементы охлаждения.
Характеристики бесконтактных магнитных подшипников
Типовой магнитный подшипник характеризуется следующими основными показателями:
- Максимальная скорость вращения ротора.
- Предельная величина нагрузки на радиальную часть.
- Диапазон рабочих температур.
- Величина энергопотребления.
Первый из этих показателей в радиальном подшипнике зависит от способности ферромагнитного ротора противодействовать центробежной силе. Предел круговой скорости для изделий этого типа в среднем составляет 200 м/с.
Для осевых магнитных подвесов с обычными материалами этот показатель равен 350 м/с (он ограничен показателем стойкости материала упора, изготовленного из литой стали). Предельная нагрузка на ось вращения также зависит от типа используемых ферромагнетиков. Для обычных материалов максимальное давление на нее не превышает 0,9 Н/см², что заметно меньше чем у контактных подшипников.
Величина энергопотребления активных магнитных узлов относительно невелика. Потери в основном приходятся на вихревые токи в материале изделия, что существенно меньше аналогичного показателя для конструкций с обычными подшипниками.
Области применения бесконтактных систем подвеса
Несмотря на все перечисленные недостатки, магнитные подшипники достаточно широко применяются в самых различных сферах человеческой деятельности. Начиная с середины прошлого века, магнитные подшипники постоянно совершенствуются, а их эксплуатационные показатели со временем только улучшаются. Все это позволяет находить изделиям этого класса вполне конкретные применения.
Практические приложения, в которых реализованы преимущества магнитных подвесов, это:
- Оптические системы с высокой точностью наведения и фокусировки.
- Современные лазерные установки.
- Специальные центрифуги для обогащения радиоактивных руд (урана, в частности).
- Газовые турбины.
- Действующие системы криогенной техники.
- Специальное генераторное оборудование с высокой частотой вращения вала.
- В различных моделях электрогенераторов и вакуумных устройств, а также в современном высокоточном и высокоскоростном станочном оборудовании.
Такие механизмы и системы востребованы в любых устройствах, где скорость вращения приводного вала должна достигать порядка 100000 оборотов в минуту. При этом также учитывается, что механические потери, помехи и погрешности при проведении точных измерений практически полностью отсутствуют.
Помимо всего перечисленного магнитные подвесы традиционно применяются в следующих промышленных механизмах:
- Компрессоры различного типа.
- Насосные станции, электромоторы и генераторы.
- Станочное оборудование повышенной точности.
Использование этих конструктивных узлов в насосных системах особо востребовано в тех отраслях, где механические подшипники из-за наличия трущихся поверхностей становятся источником нежелательного загрязнения среды.
Похожие темы:
- Ферритовые магниты. Характеристики и применеие. Плюсы и минусы
- Самариевые магниты. Характеристики и применение
- Магниты. Виды и применение. Свойства и особенности
- Сверхпроводящие магниты. Устройство и работа. Применение
- Альнико магниты. Виды и применение. Особенности
- Неодимовые магниты. Устройство и применение. Виды
Как устроены и работают бесконтактные магнитные подшипники, их достоинства и недостатки
Бесконтактные магнитные подшипники — это устройства, которые используют магнитные силы для поддержки и левитации вращающихся компонентов, таких как роторы электродвигателей, без физического контакта между ними. Они обеспечивают эффективное снижение трения и износа, что приводит к увеличению срока службы и производительности оборудования.
Говоря о магнитных подшипниках или бесконтактных подвесах, нельзя не отметить их замечательные качества: не нужна смазка, отсутствуют трущиеся части, следовательно, нет потерь на трение, крайне низкий уровень вибрации, высокая относительная скорость, малое энергопотребление, система автоматического контроля и мониторинга состояния подшипников, возможность герметизации.
Все эти достоинства делают магнитные подшипники лучшими решениями для множества применений: для газовых турбин, для криогенной техники, в высокооборотных электрогенераторах, для вакуумных устройств, для различных станков и прочего оборудования, в том числе высокоточного и высокоскоростного (порядка 100000 оборотов в минуту), где важно отсутствие механических потерь, помех и погрешностей.
Принципиально магнитные подшипники подразделяются на два типа: пассивные и активные магнитные подшипники. Пассивные магнитные подшипники изготавливаются на базе постоянных магнитов, но такой подход далеко не идеален, поэтому используется он крайне редко. Более гибкие и широкие технические возможности открываются с подшипниками активными, в которых магнитное поле создается переменными токами в обмотках сердечников.
Как работает бесконтактный магнитный подшипник

Работа активного магнитного подвеса или подшипника базируется на принципе электромагнитной левитации — левитации с использованием электрического и магнитного полей. Здесь вращение вала в подшипнике происходит без физического контакта поверхностей друг с другом. Именно по этой причине полностью исключается смазка, а механический износ тем не менее отсутствует. Так повышаются надежность и КПД машин.
Специалисты также отмечают важность наличия контроля положения вала ротора. Система датчиков непрерывно следит за положением вала и подает сигналы системе автоматического управления для точного позиционирования путем корректировки позиционирующего магнитного поля статора, — сила притяжения с нужной стороны вала делается сильнее или слабее путем регулировки тока в статорных обмотках активных подшипников.
Два конических активных подшипника либо два радиальных и один осевой активные подшипники — позволяют бесконтактно подвесить ротор буквально в воздухе. Система управления подвесом работает непрерывно, она может быть цифровой или аналоговой. Так обеспечивается высокая прочность удержания, высокая грузоподъемность, и регулируемые жесткость и амортизация. Данная технология позволяет подшипникам работать в условиях низких и высоких температур, в вакууме, на больших скоростях и в условиях повышенных требований к стерильности.
Устройство активного бесконтактного магнитного подшипника
Из вышеизложенного ясно, что основными частями системы активного магнитного подвеса являются: магнитный подшипник и автоматическая система электронного управления. Электромагниты все время действуют на ротор с разных сторон, и действие их подчинено электронной системе контроля.

Ротор радиального магнитного подшипника оснащен ферромагнитными пластинами, на которые и действует удерживающее магнитное поле от катушек статора, в результате чего ротор оказывается подвешен в центре статора, не соприкасаясь с ним. Индуктивные датчики все время следят за положением ротора. Любое отклонение от правильного положения приводит к появлению сигнала, который подается на контроллер, чтобы тот в свою очередь вернул ротор в нужное положение. Радиальный зазор может составлять от 0,5 до 1 мм.
Аналогичным образом функционирует упорный магнитный подшипник. Электромагниты в форме кольца закреплены на валу упорного диска. Электромагниты располагаются на статоре. На концах вала располагаются осевые датчики.
Для надежного удержания ротора машины во время ее остановки или в момент отказа системы удержания, используются страховочные шариковые подшипники, которые закреплены так, что зазор между ними и валом выставлен равным половине того, что имеет место в магнитном подшипнике.
Система автоматического регулирования располагается в шкафу, и отвечает за правильную модуляцию тока, проходящего по электромагнитам, в соответствии с сигналами от датчиков положения ротора. Мощность усилителей связана с максимальной силой электромагнитов, величиной воздушного зазора и временем реакции системы на изменение положения ротора.
Возможности бесконтактных магнитных подшипников
Максимально возможная скорость вращения ротора в радиальном магнитном подшипнике ограничена лишь способностью ферромагнитных пластин ротора сопротивляться центробежной силе. Обычно предел окружной скорости составляет 200 м/с, в то время как для осевых магнитных подшипников предел ограничен стойкостью литой стали упора — 350 м/с с обычными материалами.
От применяемых ферромагнетиков зависит и максимальная нагрузка, которую способен выдержать подшипник соответствующего диаметра и длины статора подшипника. Для стандартных материалов максимальное давление — 0,9 Н/см2, что меньше чем у обычных контактных подшипников, однако проигрыш в нагрузке может быть компенсирован высокой окружной скоростью при увеличенном диаметре вала.
Энергопотребление активного магнитного подшипника не очень велико. Наибольшие потери в подшипнике приходятся на вихревые токи, но это в десятки раз меньше чем та энергия, которая растрачивается при использовании в машинах обычных подшипников. Муфты, термоизоляционные барьеры и другие устройства исключаются, подшипники эффективно работают в условиях вакуума, гелия, кислорода, морской воды и т. д. Диапазон температур составляет от -253°С до +450°С.
Относительные недостатки магнитных подшипников
Между тем, есть у магнитных подшипников и недостатки.
В первую очередь — необходимость применять вспомогательные страховочные подшипники качения, которые выдерживают максимум два отказа, после чего их нужно менять на новые.
Во-вторых, сложность системы автоматического управления, которая при выходе из строя потребует сложного ремонта.
В-третьих, температура обмотки статора подшипника при высоких токах повышается — обмотки греются, и им нужно персональное охлаждение, лучше если жидкостное.
Наконец, материалоемкость бесконтактного подшипника оказывается высокой, потому что площадь несущей поверхности для поддержания достаточной магнитной силы должна быть обширной — сердечник статора подшипника получается большим и тяжелым. Плюс явление магнитного насыщения.

Но, несмотря на кажущиеся недостатки, магнитные подшипники уже достаточно широко применяются, в том числе в оптических системах высокой точности и в лазерных установках. Так или иначе, начиная с середины прошлого века магнитные подшипники все время совершенствуются.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
подшипники на неодимовых магнитах

Заводская поставка, мощный неодимовый магнит для подшипника с постоянным магнитом
0,13 $ / шт.
20000 шт. (Мин. заказ)

OEM редкоземельный постоянный Неодимовый магнитный генератор Магнитный пассивный магнитный подшипник
0,10 $-10,00 $ / шт.
50 шт. (Мин. заказ)

Лидер продаж, магнит N52, высокопроизводительный неодимовый магнит на заказ, Oem, Китай, заводская це на , постоянный магнит, подшипник 8-14 дней
0,01 $-1,00 $ / шт.
100 шт. (Мин. заказ)

Прочный неодимовый сильный N38H NdFeB приводной магнит постоянный с гальваническим никелем для магнитных подшипников
0,19 $-1,55 $ / шт.
1000 шт. (Мин. заказ)

Неодимовое Кольцо постоянного магнита производство подшипника
0,10 $-1,00 $ / шт.
1 шт. (Мин. заказ)

Лидер продаж, магнит N52, высокопроизводительный неодимовый магнит на заказ, Oem, Китай, заводская це на , постоянный магнит, подшипник 8-14 дней
0,30 $-0,55 $ / шт.
1000 шт. (Мин. заказ)

Неодимовый магнитный подшипник с 14-летним опытом
0,10 $-1,50 $ / шт.
2 шт. (Мин. заказ)

Профессиональные OEM Постоянные Магнитные Подшипники высокого качества промышленное применение неодимовый магнит Halbach
0,35 $-0,55 $ / шт.
1000 шт. (Мин. заказ)

Блок Неодимовый магнит подшипник неодимовый магнит для двигателя Bldc
0,10 $-1,00 $ / шт.
3000 шт. (Мин. заказ)

Производитель дуговой Неодимовый магнитный подшипник halbach array
20,00 $-100,00 $ / шт.
10 шт. (Мин. заказ)

Магнитный Неодимовый подшипник Halbach, сегментный моторный магнит N45
1,00 $-3,00 $ / шт.
1 шт. (Мин. заказ)
Сильный диск/круглый неодимовый магнит 10×5 под заказ круглый Oem Китай заводская це на постоянный магнит подшипник промышленный магнит
0,01 $-1,00 $ / шт.
10 шт. (Мин. заказ)
Подшипник с постоянным магнитом хорошего качества по хорошей цене
0,10 $-10,00 $ / шт.
10 шт. (Мин. заказ)

Промышленный постоянный магнитный подшипник Halbach
100,00 $-200,00 $ / шт.
1 шт. (Мин. заказ)
Продажи постоянных магнитов неодим кольцо подшипника
1,00 $ / шт.
1 шт. (Мин. заказ)

Подшипник с постоянным магнитом по акционной цене от производителя, Китай
0,05 $-1,00 $ / шт.
10 шт. (Мин. заказ)

Неодимовые магниты N52 размера под заказ для магнитных подшипников и соединений
0,10 $ / шт.
1 шт. (Мин. заказ)
Неодимовый магнит N45 с магнитным подшипником, неодимовый магнит, кольцо, промышленный магнит, постоянный магнит, яркий серебряный N35-N52 из Индии
0,10 $-0,50 $ / шт.
1000 шт. (Мин. заказ)

Высококачественный постоянный подшипник магнита дуги для мотора
30,00 $-50,00 $ / шт.
1 шт. (Мин. заказ)

Китай (материк) 20 лет профессионального поставщика постоянный магнитный подшипник хальбах массив N45 N52 Магнитный неодимовый магнит
0,80 $-3,00 $ / шт.
10 шт. (Мин. заказ)

Halbach массив магнит рекламный Oem постоянный магнит подшипник
0,30 $-0,40 $ / шт.
10 шт. (Мин. заказ)

Неодимовый круглый магнит на заказ, постоянный магнит, генератор, катушка Oem, Китай, заводская це на , постоянный магнит, подшипник CN;GUA
0,07 $-0,08 $ / шт.
100 шт. (Мин. заказ)

30 лет оптовая продажа с фабрики, неодимовый магнит Сфера баки Радуга магнитные шарики в на личии на складе
1,00 $-4,00 $ / компл.
20 компл. (Мин. заказ)