Расчет понижающих DC-DC преобразователей на микросхемах 34063 (топология Buck) + online-калькулятор
Рассмотрим типовую схему понижающего DC/DC конвертера на микросхемах 34063:
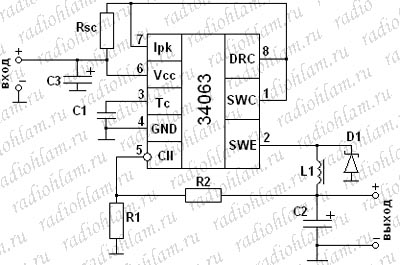
Выводы микросхемы:
- SWC (switch collector) — коллектор выходного транзистора
- SWE (switch emitter) — эмиттер выходного транзистора
- Tc (timing capacitor) — вход для подключения времязадающего конденсатора
- GND — земля (общий провод)
- CII (comparator inverting input) — инвертирующий вход компаратора
- Vcc — питание
- Ipk — вход схемы ограничения максимального тока
- DRC (driver collector) — коллектор драйвера выходного транзистора (в качестве драйвера выходного транзистора также используется биполярный транзистор)
С1 — времязадающий конденсатор, он определяет частоту преобразования. Максимальная частота преобразования для микросхем 34063 составляет порядка 100-150 кГц.
R2, R1 — делитель напряжения для схемы компаратора. На неинвертирующий вход компаратора подается напряжение 1,25 В от внутреннего регулятора, а на инвертирующий вход — с делителя напряжения. Когда напряжение с делителя становится равным напряжению от внутреннего регулятора — компаратор переключает выходной транзистор.
C2, С3 — соответственно, выходной и входной фильтры. Емкость выходного фильтра определяет величину пульсаций выходного напряжения. Если в процессе расчетов получается, что для заданной величины пульсаций требуется очень большая емкость, можно расчет сделать для бо’льших пульсаций, а потом использовать дополнительный LC-фильтр. Емкость С3 обычно берут 100 … 470 мкФ.
Rsc — токочувствительный резистор. Он нужен для схемы ограничения тока. Максимальный ток выходного транзистора для MC34063 = 1.5А, для AP34063 = 1.6А. Если пиковый переключаемый ток будет превышать эти значения, то микросхема может сгореть. Если точно известно, что пиковый ток даже близко не подходит к максимальным значениям, то этот резистор можно не ставить.
Порядок расчёта:
- Выбирают номинальные входное и выходное напряжения: Vin, Vout и максимальный выходной ток Iout.
- Выбирают минимальное входное напряжение Vin(min) и минимальную рабочую частоту fmin при выбранных Vin и Iout.
- Рассчитывают значение (ton+toff)max по формуле (ton+toff)max=1/fmin, ton(max) — максимальное время, когда выходной транзистор открыт, toff(max) — максимальное время, когда выходной транзистор закрыт.
- Рассчитывают отношение ton/toff по формуле ton/toff=(Vout+VF)/(Vin(min)-Vsat-Vout), где VF — падение напряжения на выходном фильтре, Vsat — падение напряжения на выходном транзисторе (когда он находится в полностью открытом состоянии) при заданном токе. Vsat определяется по графикам, приведенным в документации на микросхему (или на транзистор, если схема с внешним транзистором). Из формулы видно, что чем больше Vin, Vout и чем больше они отличаются друг от друга — тем меньшее влияние на конечный результат оказывают VF и Vsat, так что если вам не нужен суперточный расчет, то я бы посоветовал, уже при Vout=5 В, смело брать VF=0, Vsat=1,2 В (обычный, средненький биполярный танзистор) и не заморачиваться.
- Зная ton/toff и (ton+toff)max решают систему уравнений и находят ton(max).
- Находят емкость времязадающего конденсатора С1 по формуле: C1 = 4.5*10 -5 *ton(max).
- Находят пиковый ток через выходной транзистор: IPK(switch)=2*Iout. Если он получился больше максимального тока выходного транзистора (1,5 …1,6 А), то преобразователь с такими параметрами невозможен. Нужно либо пересчитать схему на меньший выходной ток (Iout), либо использовать схему с внешним транзистором.
- Рассчитывают Rsc по формуле: Rsc=0,3/IPK(switch).
- Рассчитывают минимальную емкость конденсатора выходного фильтра:
- С2=IPK(switch)*(ton+toff)max/8Vripple(p-p), где Vripple(p-p) — максимальная величина пульсаций выходного напряжения. Берется максимальная ёмкость из ближайших к расчётному стандартных значений.
- Рассчитывают минимальную индуктивность дросселя:
L1(min)=ton(max)*(Vin(min)-Vsat-Vout)/IPK(switch). Если получаются слишком большие C2 и L1, можно попробовать повысить частоту преобразования и повторить расчет. Чем выше частота преобразования — тем ниже минимальная емкость выходного конденсатора и минимальная индуктивность дросселя. - Сопротивления делителя рассчитываются из соотношения Vout=1,25*(1+R2/R1).
Online-калькулятор для расчёта понижающего преобразователя:
(для правильности расчётов используйте в качестве десятичной точки точку, а не запятую)
1) Исходные данные:
(если вы не знаете значения Vsat , Vf , Vripple(p-p) , то расчёт будет сделан для Vsat=1.2 В, Vf=0 В, Vripple(p-p)=50 мВ)
Понижающий преобразователь (buck converter) — расчет компонентов
В данной статье будет приведен порядок расчета и подбора компонентов, необходимых при проектировании силовой части понижающего импульсного преобразователя постоянного тока без гальванической развязки, топологии buck-converter. Преобразователи данной топологии хорошо подходят для понижения постоянного напряжения в пределах 50 вольт по входу и при мощностях нагрузки не более 100 Вт.
Все что касается выбора контроллера и схемы драйвера, а также типа полевого транзистора, оставим за рамками данной статьи, однако подробно разберем схему и особенности рабочих режимов каждого из основных компонентов силовой части преобразователей данного типа.

Начиная разработку понижающего импульсного преобразователя, принимают во внимание следующие исходные данные: величины входного и выходного напряжений, максимальный постоянный ток нагрузки, частоту переключения силового транзистора (рабочую частоту преобразователя), а также размах пульсаций тока через дроссель. Далее, исходя из этих данных, рассчитывают индуктивность дросселя, который обеспечит требуемые параметры, емкость выходного конденсатора, а также характеристики возвратного диода.
- Входное напряжение — Uвх, В
- Выходное напряжение — Uвых, В
- Максимальный ток нагрузки — Iвых, А
- Размах пульсаций тока через дроссель — Iдр, А
- Частота переключения транзистора — f, кГц
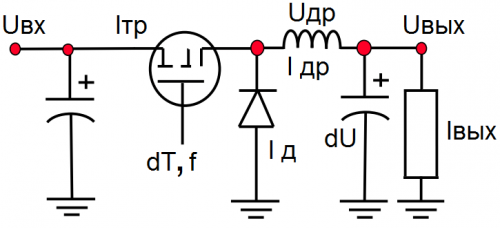
Преобразователь работает следующим образом. В первую часть периода, когда транзистор замкнут, ток подается от первичного источника питания через дроссель к нагрузке, при этом выходной конденсатор фильтра заряжается. Когда транзистор разомкнут, ток нагрузки поддерживается зарядом конденсатора и током дросселя, который мгновенно прерваться не может, и замыкается через возвратный диод, который теперь, во вторую часть периода, открыт.
Для примера допустим, что нам необходимо разработать понижающий преобразователь топологии buck converter, питаемый постоянным напряжением 24 вольта, а на выходе нужно получить 12 вольт с номинальным током нагрузки в 1 ампер, и чтобы пульсации напряжения на выходе не превышали бы 50 мВ. Пусть рабочая частота преобразователя составляет 450 кГц, а размах пульсаций тока через дроссель не превышает 30% от максимального тока нагрузки.
- Uвх = 24 В
- Uвых = 12 В
- I вых = 1 А
- I др = 0,3*1 А = 0,3 А
- f = 450 кГц
Поскольку речь идет об импульсном преобразователе, то в процессе его работы напряжение к дросселю не будет приложено постоянно, оно будет прикладываться именно импульсами, длительность положительных частей которых dT может быть рассчитана исходя из рабочей частоты преобразователя и соотношения входного и выходного напряжений по следующей формуле:
здесь Uвых/Uвх = DC — коэффициент заполнения импульса управления транзистором.
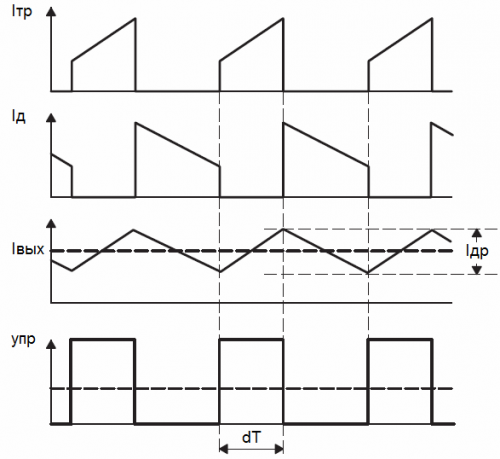
Во время положительной части импульса коммутации источник питает цепь преобразователя, во время отрицательной части импульса — запасенная дросселем энергия передается в выходную цепь.
Для нашего примера получается: dT = 1,11 мкс — время действия входного напряжения на дроссель с присоединенными к нему конденсатором и нагрузкой в течение положительной части импульса.
В соответствии с законом электромагнитной индукции, изменение тока Iдр через катушку индуктивности L (которой и является дроссель) окажется пропорционально приложенному к выводам катушки напряжению Uдр и времени его приложения dT (длительности положительной части импульса):
Напряжение на дросселе Uдр — в данном случае ни что иное, как разница между входным и выходным напряжениями в ту часть периода, когда транзистор пребывает в проводящем состоянии:
И для нашего примера получается: Uдр = 24 — 12 = 12 В — амплитуда напряжения, прикладываемого к дросселю во время положительной части рабочего импульса.

Теперь, зная величину напряжения прикладываемого к дросселю Uдр, задавшись временем действия рабочего импульса dT на дроссель, а также величиной максимально допустимого размаха пульсаций тока дросселя Iдр, можно вычислить требуемую индуктивность дросселя L:
Для нашего примера получается: L = 44,4 мкГн — минимальная индуктивность рабочего дросселя, с которой при данной длительности положительной части управляющего импульса dT, размах пульсаций не превысит Iдр.
Конденсатор
Когда величина индуктивности дросселя определена, приступают к выбору емкости выходного конденсатора фильтра. Пульсации тока через конденсатор равны пульсациям тока через дроссель. Поэтому, пренебрегая сопротивлением провода дросселя и индуктивностью конденсатора, воспользуемся следующей формулой для нахождения минимально требуемой емкости конденсатора:
где dU – пульсация напряжения на конденсаторе.
Приняв величину пульсаций напряжения на конденсаторе равной dU = 0,050 В, для нашего примера получим C = 6,66 мкф — минимальная емкость выходного конденсатора фильтра.

Наконец, остается определиться с параметрами рабочего диода. Ток через диод течет тогда, когда входное напряжение отключается от дросселя, то есть во вторую часть рабочего импульса:
Iд = (1-DC)*Iвых — средний ток через диод, когда он открыт и проводит ток.
Для нашего примера Iд = (1-Uвых/Uвх)*Iвых = 0,5 А — можно выбрать диод шоттки на ток 1 А с максимальным обратным напряжением больше входного, то есть в районе 30 вольт.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Принцип работы понижающего DC/DC преобразователя, схемы подключения
Мощный понижающий преобразователь напряжения DC/DC, схема которого включает высокочастотный транзистор, входной и выходной L-C фильтры, силовой трансформатор, микросхему управления, представляет собой импульсный конвертер, преобразующий постоянное напряжение большего значения в постоянное напряжение меньшего значения. Современные устройства дополнительно выполняют стабилизацию характеристик, снижают уровень пульсаций, обеспечивают гальваническую развязку входных и выходных электроцепей. Некоторые модели могут регулировать напряжение на нагрузке, выдавать отрицательное напряжение, что выгодно выделяет их на фоне обычных линейных регуляторов.
Понижающие преобразователи напряжения применяются в следующих сферах:
- батарейные зарядные устройства;
- мультимедийные проигрыватели, компьютерные игровые консоли;
- распределенные систем электропитания;
- мониторы и телевизоры.
Принцип работы понижающих конвертеров
Основным элементом устройств является силовой ключ, в роли которого выступает биполярный, MOSFET или IGBT транзистор. Он может находиться в двух положениях — открытом и закрытом. В первом состоянии ток протекает через ключ, во втором — нет. Таким образом, принцип работы понижающего DC/DC преобразователя заключается в следующем:
- Когда транзистор открыт, электроток от источника питания протекает по контуру ключ-индуктивность-нагрузка. При этом происходит нарастание тока от минимального до максимального значения. Энергия от источника передается в нагрузку, параллельно накапливается в катушке индуктивности и конденсаторе. Происходит так называемая фаза накачки.
- При закрытии ключа, катушка отдает накопленную энергию нагрузке — наступает фаза разряда. Ток через транзистор не протекает, а течет по контуру индуктивность-диод-нагрузка. Диод необходим для протекания обратного электротока. В некоторых схемах вместо него используется MOSFET транзистор. Это решение позволяет повысить КПД системы. Такая схема ДС/ДС понижающего преобразователя называется синхронной.
- Управление временем открытия и закрытия ключа осуществляется с помощью широтно-импульсной модуляции. Отношение времени импульса к общему времени цикла (импульс + пауза) называется коэффициентом заполнения. Изменяя его, можно регулировать величину выходного напряжения.
Как рассчитать характеристики преобразователя?
Рассмотрим пример расчета модуля конвертера с ШИМ-управлением, неизменной частотой коммутации и непрерывным током, протекающим через катушку. В качестве исходных данных используются величины входного (Uвх) и выходного напряжения (Uвых), максимального выходного тока (Iмах) и частоты коммутации (N). Рассчитаем катушку индуктивности по формуле:
L = (Uвх — Uвых)* Uвых/ Uвх (мах)*1/N*1/LIR*Iмах, где LIR — это коэффициент пульсации, который определяется соотношением размаха токовых пульсаций в катушке к выходному электротоку конвертера.
Если принять Uвх = 7. 24 В, Uвых = 2 В, Iмах = 7 А, N = 300 кГц, размах пульсаций = 300 мА, то получим L = 2,91 мкГн.
Пиковый ток катушки индуктивности вычисляем по формуле:
Iпик = Iмах + (LIR* Iмах)/2 = 8,05 А.
Выбор выходного конденсатора выполняется таким образом, чтобы величина пульсаций напряжения на выходе преобразователя и амплитуда выбросов при резком изменении тока нагрузки находились в заданных пределах. При подборе диода необходимо ориентироваться на рассеиваемую им мощность. Максимальный прямой ток диода не должен достигать наибольшего выходного тока конвертера. Для максимального снижения потерь и повышения устойчивости работы устройства важно правильно разместить компоненты преобразователя и выполнить грамотную трассировку печатной платы. Вот несколько общих рекомендаций:
- нужно уменьшить длину общего и других проводников с большими токами. Длина проводников, который подключены к транзистору, диоду и катушке должна быть минимальной;
- проводники питающей цепи должны быть короткими и широкими;
- проводники в измеряющих цепях необходимо размещать подальше от коммутационных элементов.
Схема подключения преобразователя
Рассмотрим особенности подключения мощного понижающего преобразователя напряжения DC/DC, схема которого включает гальваническую развязку. Подобные устройства выполнены обычно в корпусах, рассчитанных на установку в 19-дюймовые стойки или шкафы. Подключение осуществляется в такой последовательности:
- Подсоединяем нагрузку к клеммнику с помощью медного кабеля подходящего сечения.
- Подключает к клеммнику сеть питания. Кабель должен быть обесточенным и иметь рекомендуемое производителем конвертера сечение. Важно соблюдать полярность соединения.
- При необходимости подсоединяем линию внешней сигнализации, сообщающей об аварийном состоянии преобразователя.
- Выполняем тест работы конвертера. Проверяем наличие и величину выходного напряжения.
При установке конвертера важно, чтобы не перекрывались вентиляционные отверстия на панелях устройства. Для эффективного охлаждения внутренних компонентов рекомендуется регулярно проводить замену вентиляторов. Следует учесть, что многие модели допускают параллельную работу нескольких преобразователей для питания общей нагрузки, а также рассчитаны на работу на холостом ходу.
Критерии выбора преобразователя
При выборе импульсного понижающего преобразователя ключевыми параметрами являются:
- диапазон входного напряжения;
- выходное напряжение. Оно может быть фиксированным или регулируемым. Диапазон регулировки ограничен минимальной и максимальной длительностью импульса;
- максимальный выходной ток. Он зависит от наибольшей допустимой рассеиваемой мощности, сопротивления силовых ключей и других факторов;
- частота работы конвертера. Чем она выше, тем проще выполнять фильтрацию выходных параметров и бороться с помехами. В то же время, возрастание частоты приводит к увеличению потерь на переключение транзистора;
- коэффициент полезного действия.
Итоги
В статье были рассмотрены основные схемы ДС/ДС понижающего преобразователя, представлены рекомендации по выбору и подключению устройств.
Динамический расчет стабилизированного понижающего преобразователя напряжения постоянного тока
Для выбранной структуры подчиненного регулирования рассмотрен динамический синтез регуляторов тока и напряжения, учитывающий основные нелинейности и импульсный характер управления.
Поскольку стабилизированный преобразователь напряжения представляет собой замкнутую систему регулирования, обеспечение его заданной точности (стабильности выходного напряжения) должно производиться с учетом требований устойчивости и качества переходных режимов. Необходимо при этом учитывать и дискретный характер управления, определяемый широтно-импульсным преобразованием входного напряжения. Часто жесткие требования предъявляются и ко времени выхода преобразователя напряжения на рабочий режим при включении.
На динамические свойства преобразователя напряжения существенное влияние оказывает сглаживающий фильтр — главный инерционный элемент замкнутой системы, а также ограничение тока регулирующего элемента и невозможность, без значительного усложнения устройства, рекуперации энергии сглаживающего фильтра в источник входного напряжения.
Таким образом, динамический расчет преобразователя напряжения должен включать расчет параметров сглаживающего фильтра, выбор структуры системы регулирования и ее динамический синтез, производимые с учетом основных указанных нелинейностей и импульсного характера процессов.
Выбор параметров сглаживающего LC-фильтра
Кроме допустимого уровня пульсаций выходного напряжения, фильтр должен обеспечить и допустимый уровень пульсаций тока регулирующего элемента. Учитывая низкий уровень пульсаций выходного напряжения, можно считать пульсации тока в индуктивности фильтра пилообразными (рис. 1).
Рис. 1
Из рис. 1 получаем
где EиUH — входное и выходное напряжения преобразователя, Т0 — период широтно-модулированных импульсов, γ = τ/T0 = UН/E — относительная длительность импульсов.
Согласно (1) получаем условие для выбора I
где δIдоп — допустимый размах пульсаций, Етах —максимальное входное напряжение.
При требовании сохранения режима непрерывного тока вплоть до минимального тока нагрузки IHmin в (2) следует подставить δIдоп=2IHmin.
Пульсации выходного напряжения (рис. 2) с достаточной точностью можно определить, полагая, что переменная составляющая тока замыкается только через конденсатор фильтра. Это дает:
Рис. 2
Следующее из (3) условие для выбора емкости конденсатора фильтра имеет вид
При выборе параметров фильтра помимо условий (2) и (4) необходимо учесть следующие соображения. Вследствие невозможности рекуперации энергии индуктивности в источник питания сброс нагрузки преобразователя напряжения приводит к неконтролируемому росту выходного напряжения, вызываемому зарядом конденсатора током индуктивности через «обратный диод». Используя закон сохранения энергии, легко определить относительную величину выброса напряжения.
Из (5) очевидно, что для снижения неконтролируемого повышения выходного напряжения при сбросе нагрузки следует уменьшать отношение L/C. При выбранной величине L и задании допустимого значения δUH/UH емкость конденсатора фильтра должна удовлетворять условию
Выбирая параметры фильтра, необходимо учесть и требование ко времени заряда конденсатора до номинального выходного напряжения при включении преобразователя напряжения. Защита регулирующего элемента (РЭ) от динамической перегрузки током заряда конденсатора фильтра, многократно превышающим допустимый ток Im, требует ограничения тока РЭ. С его учетом время заряда можно оценить по эквивалентной схеме рис. 3, описываемой дифференциальным уравнением
где Tз = RH x С — постоянная времени заряда конденсатора, RH — сопротивление нагрузки. Решение (7) при U(0) = 0 дает
Рис. 3
Время заряда, определяемое условием U(tз) = UH = IH x RH, согласно (8) составляет
Очевидно, что увеличение Im ускоряет заряд конденсатора, но приводит к ужесточению требований к регулирующему элементу и дросселю фильтра по току подмагничивания. Обеспечив подключение нагрузки только после установления выходного напряжения, время заряда можно уменьшить до значения
Разумеется, оценка tз должна уточняться при расчете системы регулирования, одной из задач которого должно быть недопущение выброса напряжения нагрузки при окончании заряда конденсатора фильтра.
Выбор структуры стабилизированного преобразователя напряжения
Необходимость контроля не только выходного напряжения, но и тока регулирующего элемента делает предпочтительной структуру подчиненного регулирования (рис. 4), содержащую подчиненный контур регулирования тока и основной контур регулирования напряжения.
Рис. 4.
Ограничение задающего воздействия регулятора тока (РТ) позволяет весьма просто ограничить ток регулирующего элемента VT. Наличие индуктивности и высокая частота широтно-импульсного модулятора ШИМ обеспечивают надежное ограничение при пропорциональном РТ.
Синтез регуляторов тока и напряжения (РТ и РН) рационально проводить по непрерывной модели, а проверку устойчивости — по импульсной модели.
Контур регулирования тока
Основная задача контура РТ — не допустить превышения током VT допустимого уровня Im и поддерживать его на этом уровне во время заряда конденсатора фильтра. Пропорциональный регулятор (П-регулятор) может поддерживать постоянный ток VT во время заряда конденсатора только при достаточно высоком его коэффициенте усиления KPT. Чтобы излишне не повышать KPT, что может нарушить устойчивость контура РТ и вызвать недопустимые субгармонические автоколебания, постоянство тока можно обеспечить введением положительной обратной связи по выходному напряжению. Если при этом крутизну пилообразного напряжения ШИМ — α, сделать пропорциональной напряжению Е, коэффициент усиления широтно-импульсного преобразователя (ШИП), состоящего из ШИМ и VT, по постоянной составляющей KП остается постоянным при изменениях Е. Это не только полностью исключает риск потери устойчивости контура РТ под действием положительной обратной связи по напряжению, но и практически устраняет влияние изменения Е на выходное напряжение преобразователя. Проще всего это осуществить, получив пилообразное напряжение развертки ШИМ путем заряда периодически разряжаемого конденсатора емкостью СП через резистор с большим сопротивлением RП от напряжения Е. При этом крутизна пилообразного напряжения
а относительная длительность импульсов ШИМ и статический коэффициент усиления ШИП — KП, составляют:
Из (11) очевидна независимость КП от Е. Благодаря этому изменение Е не вызывает изменение полезной составляющей выходных импульсов ШИП γ E = КП x UPT. Физически это проявляется в уменьшении длительности импульсов τ при увеличении Е и в увеличении τ при уменьшении Е без изменения UРТ.
Непрерывная модель контура РТ описывается следующими уравнениями
где UЗТ = UРН — задающий сигнал контура РТ, RШ — крутизна датчика тока ДТ, имеющая размерность сопротивления, χ — коэффициент передачи датчика напряжения ДН, Ki и K+ — относительные коэффициенты усиления сигналов ДТ и ДН соответственно, KPT — оэффициент усиления РТ, T2 = RHxC, γm — предельное значение γ, U — выходное напряжение преобразователя. Из первых двух уравнений системы (12) следует
Удобная для моделирования структурно-динамическая схема контура РТ представлена на рис. 5.
Рис. 5
В линейной зоне передаточная функция замкнутого контура РТ имеет вид:
Из (14) очевидно, что при выполнении условия
контур РТ обладает астатизмом I порядка, то есть отрабатывает заданное значение тока
без ошибки. Это обеспечивает полное использование силового транзистора VT по току во время переходного процесса заряда конденсатора фильтра.
При выполнении условия (15) согласно (14) имеем
— постоянная времени и коэффициент передачи замкнутого контура РТ в линейной зоне. Очевидно, увеличение KPT снижает инерционность контура РТ в линейной зоне, но приближает его к границе области устойчивости как замкнутую широтно-импульсную систему. Условие устойчивости установившегося режима с постоянной длительностью импульсов можно получить по методике, изложенной в [1]. Предварительно необходимо определить закон изменения тока iL в установившемся режиме при заданной величине τ, применив, например, методику, описанную в [2] и использующую смещенное Z-преобразование [3].
Результаты анализа показали, что условие устойчивости зависит от γ = τ/T0. При высокой частоте импульсов условие устойчивости имеет вид
В случае изменения γ от 0 до 1 неравенство
гарантирует от появления нежелательных субгармонических автоколебаний.
Контур регулирования напряжения
Основные требования к контуру РН:
- стабильность выходного напряжения при изменениях входного напряжения Е, тока нагрузки IH и параметров элементов контура;
- быстрое апериодическое затухание переходных процессов при сигнальных и параметрических возмущениях;
- ограничение выходного напряжения РН, обеспечивающее защиту силового транзистора от перегрузки по току UPH=UЗТKiRШIm.
В качестве РН наиболее подходящим является пропорционально-интегральный (ПИ) регулятор, поскольку при идеальном ДН обеспечивает стабильность выходного напряжения при всех допустимых возмущениях, а при правильном выборе его параметров — апериодическое затухание переходной характеристики. Ограничение задающего напряжения РТ при РН, реализованном на операционном усилителе, весьма просто осуществить, включив стабилитрон в обратную связь усилителя. Благодаря этому будет исключено нарастание интегральной составляющей выходного напряжения РН во время заряда конденсатора фильтра, вызывающее значительное превышение заданной величины выходного напряжения преобразователя. Структурно-динамическая схема контура РН представлена на рис. 6.
Рис. 6
На рис. 6 KPH и TPH параметры ПИ регулятора с передаточной функцией
В линейной зоне с учетом (17) контур РН можно представить более простой структурно-динамической схемой, изображенной на рис. 7.
Рис. 7
Поскольку реально T2 TI постоянную времени РН TPH следует выбрать равной Т2, что дает передаточную функцию замкнутого контура РН
Выбор KPH из условия ξ ≥1 обеспечивает апериодическую переходную характеристику контура РН. Значительное увеличение ξ нежелательно, поскольку затягивает переходный процесс. При ξ =1, (K= 1/4TI; T = 4xTI 2 ; T= 2TI) переходная характеристика контура РН, описываемая формулой
представляет собой апериодическую кривую рис. 8.
Рис. 8
Из рис. 8 видно, что при скачкообразном приращении U3H в линейной зоне переходный процесс закончится с точностью до 5%-ной ошибки за время, меньшее 10 Тг
При равенстве Тj= Т0= 25 мкc время переходного процесса не превосходит 0,25 мc, что в большинстве случаев вполне устраивает. Более жестким требованиям можно удовлетворить, повышая частоту коммутации/= 1/Т0. При скачкообразных приращениях Uзн, выходящих из линейной области, переходный процесс с учетом действия всех нелинейностей можно получить моделированием по структурно-динамической схеме (рис. 6), например, используя систему Matlab.
Характерное для стабилизированных преобразователей напряжения параметрическое возмущение представляет собой скачкообразное изменение сопротивления нагрузки RH. Его можно свести к скачкообразному изменению начальных условий в системе с новыми значениями параметров. В системе с новыми значениями параметров ток в дросселе фильтра, напряжение на конденсаторе фильтра, интегральная составляющая выходного напряжения ПИ-регулятора остаются равными их установившимся значениям при исходных значениях параметров. В отличие от скачкообразного приращения U3H параметрическое возмущение может вызвать перерегулирование выходного напряжения, имеющее место, например, при сбросе нагрузки вследствие заряда конденсатора фильтра током дросселя через обратный диод VD (рис. 4). Очевидно, никакое усложнение РН не может устранить это перерегулирование, определяемое невозможностью рекуперации энергии, запасенной в дросселе фильтра в источник входного напряжения. Для его ограничения допустимой величиной, например величиной допустимой ошибки стабилизации, следует выполнить условие (6).
- Коршунов А. И. Анализ динамических свойств замкнутых систем со статическими преобразователями с помощью линеаризованных моделей // Электричество. №5’1994. С. 30-39.
- Коршунов А. И. Определение установившейся реакции линейной непрерывной системы на периодическое воздействие // Изв. вузов. Приборостроение. №8’1981. С. 37-40.
- Деч Г. Руководство к практическому применению преобразования Лапласа и Z-преобразования // М.: Наука. 1978. 288 с.