Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f — частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
6.22. Способы регулирования частоты вращения трехфазного асинхронного двигателя
Регулирование частоты вращения электрических асинхронных двигателей является очень важной проблемой. Основным недостатком асинхронных двигателей является ограниченная возможность регулирования частоты вращения по сравнению с двигателями постоянного тока, которые позволяют изменять частоту вращения в очень широких пределах.
В настоящее время используются следующие основные методы регулирования частоты вращения асинхронных двигателей. Изменение частоты вращения достигается:
а) изменением приложенного напряжения,
б) изменением числа пар полюсов,
в) изменением частоты питающей сети,
г) изменением сопротивления обмотки ротора,
д) введением в роторную цепь дополнительной ЭДС такой же частоты, как и частота обмотки ротора.
Последний способ достаточно сложен.
6.22.1. Изменение частоты вращения с помощью изменения числа пар полюсов
В соответствии с принципом действия асинхронных двигателей вращение магнитного поля статора определяется частотой питающей сети и числом пар полюсов в соответствии с формулой
При неизменной частоте питающей сети частота вращения магнитного поля зависит от числа пар полюсов. Частота же вращения магнитного поля определяет частоту вращения ротора.
Изменение числа пар полюсов машины можно осуществить следующим образом:
а) изменением способа соединения статорной обмотки,
б) расположением на статоре двух или более независимых обмоток, обеспечивающих при их использовании различное число пар полюсов,
в) расположением на статоре обмоток, обеспечивающих возможность коммутации с целью получения различного числа пар полюсов.
Двигатели с изменяющимся числом пар полюсов изготавливаются с короткозамкнутым ротором, т. е. с обмоткой в форме беличьего колеса. Существует много методов изменения числа пар полюсов. Чаще всего используют метод коммутации статорной обмотки с целью изменения направления тока в различных частях каждой фазной обмотки.
Объяснить получение различного числа пар полюсов с помощью коммутации обмотки статора можно, продемонстрировав пример двух полуобмоток (рис. 6.51).
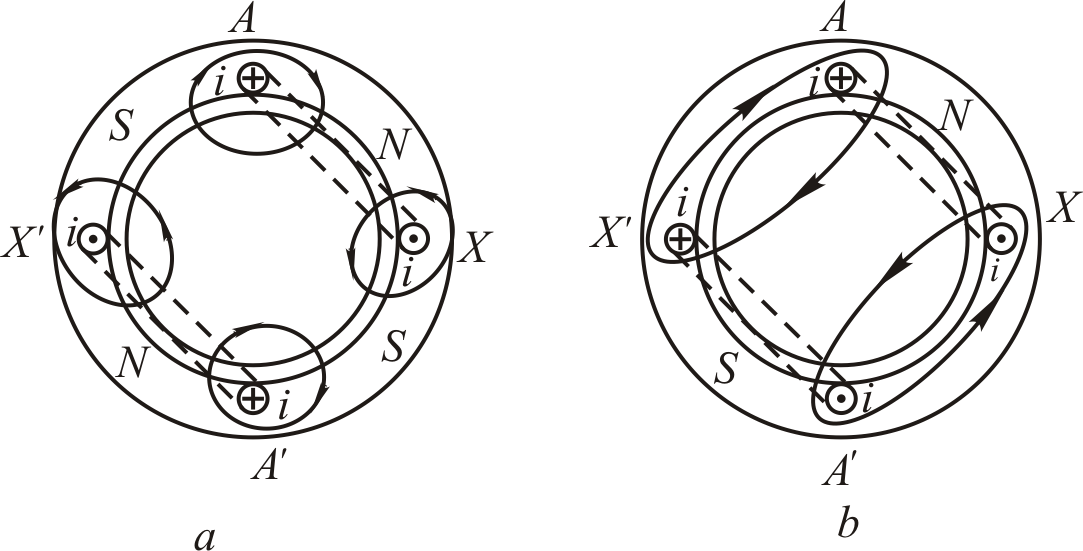
Если обмотка фазы статора состоит из двух полуобмоток и , то при их последовательном включении, когда конец полуобмотки соединен с началом полуобмотки , образуются две пары полюсов (направление токов проводников обмоток и магнитные силовые линии обмоток показаны на рис. 6.51, a). Если изменить направление тока в одной из обмоток (например в полуобмотке ), то в проводниках и так же, как и в проводниках и , токи будут протекать в одном направлении и суммарное магнитное поле будет иметь одну пару полюсов (рис. 6.51, б).
Примеры схем коммутации статорной обмотки с целью получения различного числа пар полюсов приведены на рис. 6.52, a, б. В первом случае обмотки статора соединены треугольником. При этом обмотки каждой фазы состоят из двух полуобмоток, расположенных в статоре со сдвигом в пространстве на 180 . С помощью аппаратов управления полуобмотки каждой фазы включаются параллельно по схеме «звезда». Трехфазное напряжение при этом подводится к средней точке каждой обмотки, и направление тока в половинах каждой из фазных обмоток меняется на противоположное, обеспечивая большее количество пар полюсов.
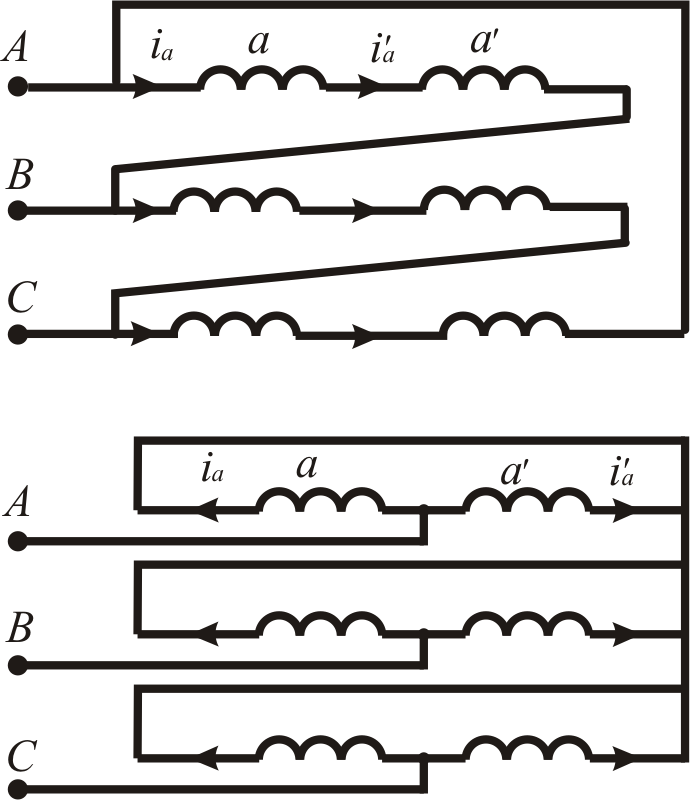
Измерение числа пар полюсов можно получить, не изменяя схемы соединения обмотки (имеется ввиду переход от соединения «треугольник» к соединению «звезда»). На рис. 6.52 представлена схема соединения обмотки статора «звездой». Как и в предыдущем случае, фазные обмотки статора состоят из полуобмоток. Изменение направления тока в одной из полуобмоток каждой фазы приводит к увеличению числа пар полюсов и, как следствие, к изменению синхронной скорости. Следует отметить то, что изменение числа пар полюсов возможно только у двигателей, у которых выведены на клеммную панель соответствующие точки обмоток. Промышленность выпускает в основном одно- и двухскоростные двигатели.
Изменяя число пар полюсов, можно получить следующие частоты вращения магнитного поля при частоте сети 50 Гц: 3000, 1500, 1000, 750 и 500 об/мин. Изменение числа пар полюсов коммутацией обмотки статора приводит к изменению направления вращения, поэтому для сохранения направления вращения магнитного поля необходимо изменить порядок следования фаз питающей сети.
Регулирование частоты вращения асинхронных двигателей

Регулирование частоты вращения двигателей определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых они используются. Оно характеризуется следующими основными показателями.
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя к его минимальной частоте вращения.
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
Направление возможного изменения частоты вращения двигателя (зона регулирования).
При номинальных условиях работы (напряжении и частоте питающей сети) двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения выше и ниже естественной характеристики. Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
Допустимая нагрузка двигателя при работе его на регулировочных характеристиках ограничивается величинами токов в статорной и роторных цепях. Эта нагрузка определяется допустимым нагревом двигателя и во многом определяется механическими характеристиками производственных механизмов, моментом сопротивления на валу, моментом инерции двигателя и механизма и т. д.
Регулирование частоты вращения асинхронных двигателей может производиться способом воздействия на него со стороны статора или со стороны ротора. Все три способа нашли широкое применение на практике. Рассмотрим эти способы подробнее.
Регулирование частоты вращения изменением частоты питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода. При изменении частоты питающей сети обеспечивается изменение частоты вращения магнитного поля асинхронного двигателя. Источник питания двигателя должен осуществлять преобразование напряжения стандартной частоты сети 50 Гц в напряжение с требуемой частотой. Одновременно с изменением частоты должна регулироваться по определенному закону и величина подводимого к двигателю напряжения, чтобы обеспечить высокую жесткость механической характеристики и требуемую перегрузочную способность двигателя. При регулировании частоты вращения асинхронных двигателей изменением частоты питающей сети можно обеспечить различные режимы работы: с постоянным вращающим моментом; с постоянной мощностью на валу; с моментом, пропорциональным квадрату частоты.
Зависимости между регулируемыми напряжением и частотой с учетом влияния активного сопротивления статора, изменения жесткости механических характеристик, насыщения стали, ухудшения теплоотдачи на низких частотах вращения ротора двигателя имеют довольно сложный характер. В качестве источника питания могут применяться электромашинные вращающиеся преобразователи, использующие электрические машины, или статические преобразователи частоты на полупроводниковых приборах, которые серийно выпускает промышленность. Положительным свойством частотного регулирования является возможность плавного регулирования в широком диапазоне в обе стороны от естественной характеристики (в том числе возможно вращение двигателя с частотой, большей номинальной). При регулировании обеспечивается жесткость характеристик и высокая перегрузочная способность. Однако в ряде случаев в приводах металлообрабатывающих станков, электрошпинделей, мощных воздуходувок и других механизмов частотное регулирование является наиболее приемлемым.
Регулирование частоты вращения изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. При неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Кроме двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотка, а в четырехскоростных — две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин. Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин. К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Как отмечалось, в рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростных двигателей, предназначенных для работы на двух, трех или четырех скоростях. Регулирование частоты вращения изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании.
Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку. При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется.
Для регулирования частоты вращения уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя, в результате чего изменяются и значения рабочих скольжений. При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента. Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Статьи по теме:
| Подготовка и пуск электродвигателя. Установке электродвигателя для эксплуатации предшествует выбор места этой установки. При этом необходимо учесть следующее: а) место установки двигателя должно исключить возможность попадания на его обмотки и токосъемные устройства воды, масла, эмульсии и т. п. . >>> |
| Применение синхронных и асинхронных электродвигателей. Одним из преимуществ синхронных двигателей по сравнению с асинхронными является то, что они обладают большей перегрузочной способностью. Весьма важно, что перегрузочная способность синхронных двигателей может быть увеличена за счет автоматического регулирования тока возбуждения . >>> |
| Что дает плавный пуск электродвигателей. При запуске электродвигателя в его обмотках происходит переходный процесс, сопровождаемый скачком тока, который с течением времени . >>> |
Регулирование частоты вращения асинхронного двигателя изменением числа полюсов в обмотке статора
Регулирование частоты вращения асинхронного двигателя изменением числа полюсов в обмотке статора обеспечивается благодаря изменению частоты вращения магнитного поля статора. Как следует из формулы (3), при неизменной частоте питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте питающей сети, равной 50 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Изменение числа пар полюсов обычно достигается следующими способами:
1. На статоре двигателя укладываются две электрически не связанные между собой обмотки, имеющие разное число пар полюсов, например р1 и р2. При подключении одной из обмоток к сети переменного тока, например, с числом полюсов р2 асинхронный двигатель будет иметь синхронную частоту вращения, соответствующую данному числу полюсов (рис. 27, а):
Другая обмотка при этом обесточена. При необходимости получения другой частоты вращения n1 обмотка с числом полюсов р2 отключается и включается с числом полюсов р1. Такие асинхронные двигатели получили название двухобмоточных.
2. На статоре укладывается одна обмотка, допускающая переключение на разное число полюсов. Наиболее широко распространены две схемы переключения статорной обмотки двухскоростных двигателей: с треугольника на двойную звезду Д/УУ и со звезды на двойную звезду У/УУ (звезду с двумя параллельными ветвями).
Схемы соединения обмоток Д/УУ применяются для получения примерно одинакового вращающего момента при обеих частотах вращения (рис. 27,а). Такие схемы применяются, например, у асинхронных двигателей привода компрессоров, металлорежущих станков и др. Схемы соединения обмоток У/УУ используются для приводов вентиляторов (рис. 27, б).
Рис. 27. Механические характеристики при регулировании частоты вращения асинхронных двигателей изменением числа пар полюсов при переключении статорной обмотки: а — треугольник (число пар полюсов p=p1) — двойная звезда (р=р2); б — звезда (p=р1) — двойная звезда (р=р2)
Кроме рассмотренных вариантов двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотка, а в четырехскоростных — две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин.
Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин.
Электродвигатели с короткозамкнутым ротором могут иметь ряд специфических ненормальностей из-за неправильного соотношения числа пазов статора z1, ротора z2 и числа полюсов 2р.
Ненормальности заключаются в том, что двигатель может «прилипать», т. е. не приходить во вращение при подключении к сети, или «застревать», т. е., начав вращаться, останавливаться при некоторой частоте вращения, или при вращении сильно гудеть.
Во избежание указанных явлений должны быть выдержаны следующие соотношения:
где k — любое целое число от одного до четырех.
Здесь же следует заметить, что изменение числа полюсов может иметь место не только при регулировании частоты вращения асинхронного двигателя способом изменения его полюсности, но и при ремонте, связанном с изменением номинальной частоты вращения.
К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность и относительно большой диапазон регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.
Как отмечалось, в рамках единой общепромышленной серии асинхронных двигателей 4А выпускается модификация многоскоростных двигателей, предназначенных для работы на двух, трех или четырех скоростях.
Однообмоточные двигатели выпускаются на следующие соотношения частот вращения: 1500/3000, 750/1500, 1000/1500, 750/1000, 500/1000 об/мин. Двухобмоточные (трехскоростные) имеют соотношения 1000/1500/3000, 750/1500/3000, 750/1000/1500 об/мин, двухобмоточные (четырехскоростные) —750/1000/1500/3000, 500/750/1000/1500 об/мин.
В обозначении многоскоростных двигателей приводят все числа полюсов, на которые переключаются обмотки. Например, четырехскоростной асинхронный двигатель на 500/750/1000/1500 об/мин (2р= 12/8/6/4) обозначается 4А200М12/8/6/4УЗ.