Современные бесколлекторные двигатели постоянного тока
Современные бесколлекторные двигатели постоянного тока — это электродвигатели, которые не имеют щеток и коллектора для коммутации тока в обмотках. Вместо этого они используют специальную электронику для управления током в зависимости от положения ротора, на котором закреплены постоянные магниты.
Бесколлекторные двигатели имеют ряд преимуществ перед коллекторными, таких как высокий КПД, низкий уровень шума, длительный срок службы, возможность работы при высоких скоростях и моментах.
Бесколлекторные двигатели применяются в различных областях, таких как авиация, автомобильная промышленность, робототехника, медицина, бытовая техника и другие.

Благодаря существенному прогрессу в области полупроводниковой электроники и в технологии создания мощных неодимовых магнитов, широкое распространение получили сегодня бесколлекторные двигатели постоянного тока. Они применяются в стиральных машинах, пылесосах, вентиляторах, дронах и т. д.
И хотя идея касательно принципа работы бесколлекторного двигателя высказывалась еще в начале 19 века, она ждала своего часа до начала полупроводниковой эры, когда технологии стали готовы к практической реализации этой интересной и эффективной концепции, позволившей бесколлекторным двигателям постоянного тока шагать так широко, как это происходит сегодня.
В англоязычной версии двигатели данного типа именуются BLDC motor – Brushless Direct Current Motor — бесщеточный двигатель постоянного тока. Ротор двигателя содержит постоянные магниты, а рабочие обмотки располагаются на статоре, то есть устройство BLDC двигателя полностью противоположно тому, как это имеет место в классическом коллекторном двигателе. Управляется BLDC двигатель электронным регулятором, который называют ESC — Electronic speed controller — электронный регулятор хода.
Электронный регулятор хода и высокий КПД
Электронный регулятор хода позволяет плавно варьировать электрическую мощность, подаваемую на бесколлекторный электродвигатель. В отличие от ранних, более простых версий резистивных регуляторов хода, которые просто ограничивали мощность путем включения в цепь последовательно с двигателем активной нагрузки, превращающей избыточную мощность в тепло, электронный регулятор хода позволяет получить значительно более высокий КПД, не расходуя подводимую электрическую энергию на бесполезный нагрев.
Бесколлекторный двигатель постоянного тока можно классифицировать как самосинхронизируемый синхронный двигатель, в котором полностью исключен искрящий узел, требующий регулярного обслуживания — коллектор. Функцию коллектора несет на себе электроника, благодаря чему вся конструкция изделия сильно упрощается и становится компактнее.
Щетки заменены, по сути, на электронные ключи, потери в которых сильно меньше чем были бы при механической коммутации. Мощные неодимовые магниты на роторе позволяют добиться большего момента на валу. И греется такой двигатель меньше нежели его коллекторный предшественник.
В итоге КПД двигателя получается наилучшим, а показатели мощности на килограмм веса — выше, плюс достаточно широкий диапазон регулировки скорости вращения ротора и практически полное отсутствие генерируемых радиопомех. Конструктивно двигатели данного типа легко адаптируются для эксплуатации в воде и в агрессивных средах.
Электронный блок управления — очень важная и дорогостоящая часть бесколлекторного двигателя постоянного тока, без которой, однако, никак не обойтись. От данного блока двигатель получает питание, параметры которого одновременно влияют и на скорость, и на мощность, которую двигатель будет в состоянии развить под нагрузкой.
Даже если скорость вращения регулировать не нужно, все равно электронный блок управления необходим, ведь он несет на себе не только функцию управления, но также имеет силовую составляющую. Можно сказать, что ESC – это аналог частотного регулятора для асинхронных двигателей переменного тока, специально предназначенный для питания и управления бесколлекторным двигателем постоянного тока.
Управление двигателем BLDC
Чтобы понять как происходит управление BLDC двигателем, сначала вспомним как работает коллекторный двигатель. В его основе принцип вращения рамки с током в магнитном поле.
Каждый раз, когда рамка с током повернулась и нашла положение равновесия, коммутатор (щетки прижатые к коллектору) изменяет направление тока через рамку, и рамка движется дальше. Этот процесс повторяется при движении рамки от полюса к полюсу. Только вот в коллекторном двигателе таких рамок много и магнитных полюсов несколько пар, поэтому коллекторно-щеточный узел содержит не два контакта, а много.
Электронный блок управления бесколлекторным двигателем делает то же самое. Он изменяет полярность магнитного поля как только ротор необходимо провернуть дальше из положения равновесия. Только управляющее напряжение подается не на ротор, а на обмотки статора, и делается это при помощи полупроводниковых ключей в нужные моменты времени (фазы ротора).
Очевидно, что электрический ток на обмотки статора бесколлекторного двигателя необходимо подавать в правильные моменты времени, то есть тогда, когда ротор находится в определенном известном положении. Для этого применяется один из следующих методов. Первый — на основе датчика положения ротора, второй — путем измерения ЭДС на одной из обмоток, которая в данный момент не получает питание.
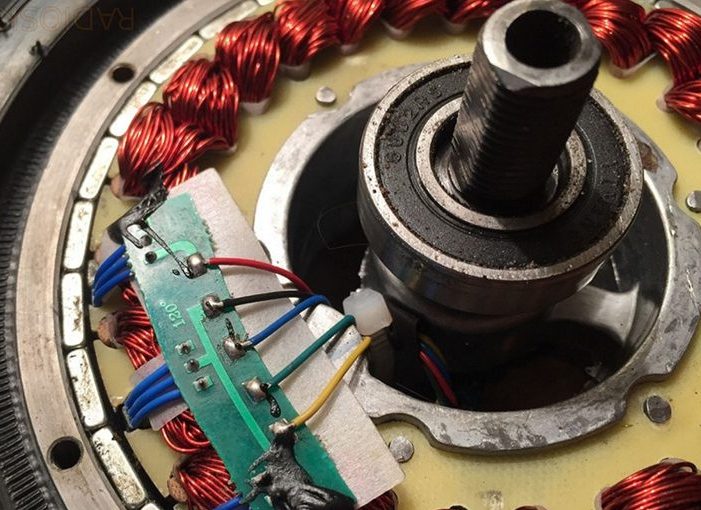
Датчики бывают разными, магнитными и оптическими, наиболее популярны магнитные датчики на основе эффекта Холла. Второй способ (на основе измерения ЭДС) хотя и эффективен, однако он не позволяет осуществлять точное управление на низких скоростях и при старте. А вот датчики Холла обеспечивают возможность более точного управления во всех режимах. В трехфазных BLDC двигателях таких датчиков три штуки.
Двигатели без датчиков положения ротора применимы в тех случаях, когда старт двигателя происходит без нагрузки на валу (вентилятор, пропеллер и т. п.). Если же старт происходит под нагрузкой, необходим двигатель с датчиками положения ротора. В том и в другом варианте есть свои плюсы и минусы.
Решение с датчиком оборачивается более удобным управлением, но при выходе из строя хотя бы одного из датчиков, двигатель придется разбирать, к тому же датчики требуют отдельных проводов. В варианте без датчика нет надобности в специальных проводах, но во время старта ротор будет раскачиваться туда-сюда. Если это недопустимо, необходимо ставить в систему датчики.
Ротор и статор, количество фаз
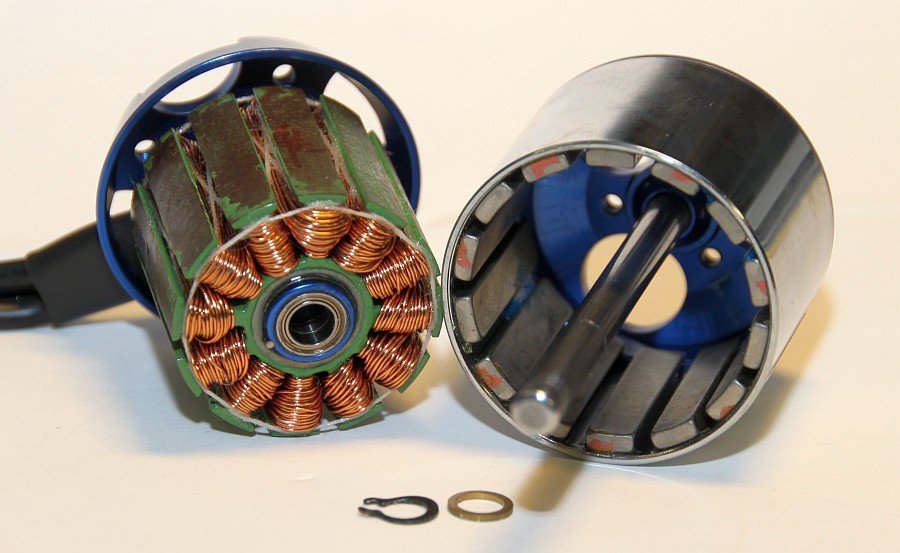
Ротор BLDC двигателя может быть наружным или внутренним, а статор, соответственно, внутренним или наружным. Статор изготавливают из магнитопроводящего материала, с количеством зубцов, которое нацело делится на количество фаз. Ротор может быть изготовлен необязательно из магнитопроводящего материала, но обязательно с жестко зафиксированными на нем магнитами.

Чем сильнее магниты — тем выше доступный вращающий момент. Количество зубцов статора не обязательно должно быть равно количеству магнитов на роторе. Минимальное количество зубцов равно количеству фаз управления.
Большинство современных бесколлекторных двигателей постоянного тока — трехфазные, просто в силу простоты такой конструкции и способа управления ею. Как и в асинхронных двигателях переменного тока, обмотки трех фаз соединяются здесь на статор «треугольником» либо «звездой».
Такие двигатели без датчиков положения ротора имеют 3 питающих провода, а двигатели с датчиками — 8 проводов: дополнительные два провода — для питания датчиков и три — сигнальные выводы датчиков.
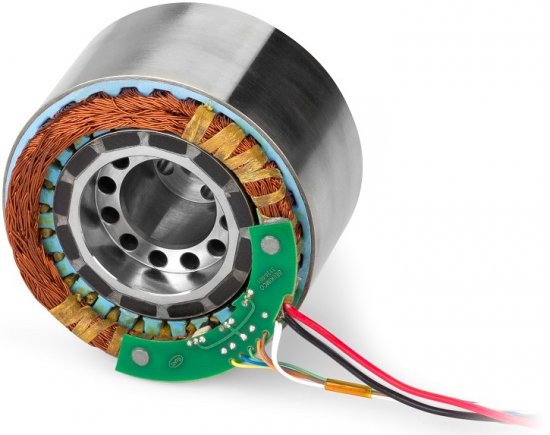
Обмотка статора выполняется изолированным медным проводом так, чтобы сформировать магнитные полюса необходимого количества фаз, равномерно распределенные по окружности ротора. Количество отдельно стоящих полюсов на статоре для каждой фазы выбирается исходя из требуемой скорости вращения двигателя (и вращающего момента).
Низкооборотные двигатели с наружным ротором делают с большим количеством полюсов (и соответственно зубцов) на каждую фазу, чтобы получить вращение с угловой частотой значительно меньше частоты управляющего тока. Но даже в высокооборотных трехфазных двигателях обычно не применяют количество зубцов меньше 9.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Бесколлекторный электродвигатель постоянного тока
На данный момент в разных технических средствах, машинах и механизмах чаще всего используются не обычные, а бесколлекторные двигатели постоянного тока. Такие электродвигатели – BLDC (Brushless Direct Current Motor) – отличаются высокой надежностью, поскольку не содержат щеточно-коллекторного узла, который является слабым местом у обычных моторов синхронного типа.
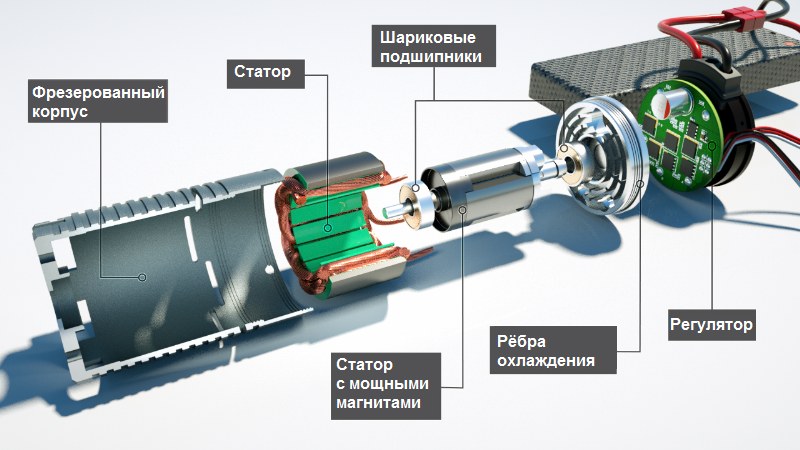
Устройство бесколлекторного электродвигателя
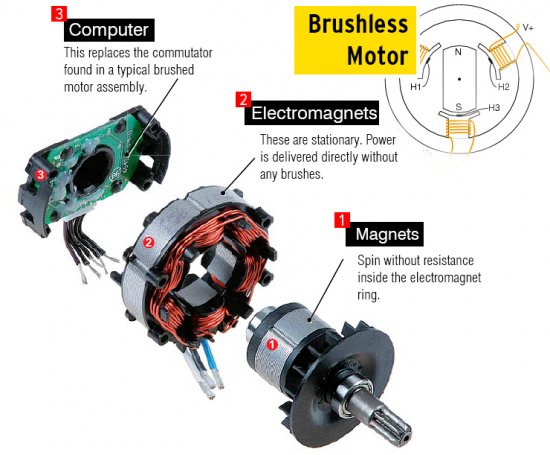
На практике бесколлекторный электродвигатель постоянного тока имеет высокий КПД и экономичность токопотребления, поскольку энергия не расходуется на лишний нагрев внутренних элементов. Для лучшего понимания функционирования бесколлекторого двигателя электрического тока, стоит подробней рассмотреть его конструкционные особенности. Основные компоненты такого электродвигателя постоянного тока включают в себя следующее:
- Статор. Состоит из неподвижных магнитов или катушек, расположенных вокруг вращающегося ротора. Эти магниты или катушки создают магнитное поле, которое взаимодействует с ротором.
- Ротор. Представляет собой вращающуюся часть двигателя, который содержит постоянные магниты или катушки, создающие второе магнитное поле. Ротор может быть дисковым или цилиндрическим, в зависимости от модификации.
- Датчики Холла. Для управления двигателем и определения его положения вращения на роторе устанавливаются датчики Холла. С их помощью обеспечивается мониторинг магнитного поля ротора и предоставляется обратная связь для электронного управления.
- Электронное управление. Данная система обрабатывает информацию от датчиков Холла и управляет подачей электрического тока в обмотки статора. Это управление позволяет предельно точно регулировать вращение ротора.
Примечательно, что в двигателях используются специальные электронные ключи, которые создают гораздо меньшие потери, нежели при механической коммутации. Наиболее дорогостоящие частью прибора является электронный блок, от управления которого зависят такие параметры, как скорость вращения и мощность двигателя.
Особенности бесколлекторного электродвигателя постоянного тока
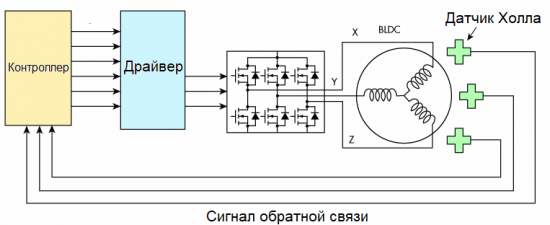
Примечательно, что двигатели бесколлекторного типа являются разновидностью синхронных силовых установок, но оснащенных магнитами постоянного тока. Они питаются от цепи через встроенный инвертор, управление которым обеспечивается за счет контроллеров, оснащенных системой обратной связи. Работа происходит следующим образом.
Контроллер подает на фазу мотора ток определенного напряжения, который требуется для создания крутящего момента. После этого приводится в действие вращение ротора и прибор начинает функционировать. Примечательно, что с момента возникновения бесколлекторных двигателей, их конструкция постепенно усложнялась и совершенствовалась. Приборы такого типа являются очень надежными и долговечными, поэтому они стали активно использоваться в разных установках.
Принципы работы бесколлекторного электродвигателя постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока заключается в том, что электроника управления переключает ток в обмотках статора таким образом, чтобы создавать вращательное магнитное поле в статоре. Именно поле взаимодействует с магнитами (или катушками) на роторе, вызывая его вращение.
Датчики Холла при этом обеспечивают обратную связь для определения положения ротора, а также коррекции управляющего сигнала. Для лучшего понимания того, как работает бесколлекторный электродвигатель постоянного тока, рассмотрим основные узлы такого устройства:
- Магнитное поле. Бесколлекторный двигатель имеет постоянные магниты (обычно на роторе) и статор, который содержит катушки.
- Электроника управления. Бесколлекторные двигатели оборудованы электроникой управления, которая контролирует подачу электрического тока в катушки статора. Эта электроника может быть микроконтроллером или специализированным контроллером.
- Датчики позиции. Для точного управления вращением ротора и определения его положения, бесколлекторные двигатели обычно оснащаются датчиками позиции. Они позволяют предельно точно предоставлять информацию о текущем положении ротора.
- Электронное управление фазами. На основе данных от датчиков позиции электроника управления определяет, какие фазы катушек статора следует активировать, чтобы создать вращающееся магнитное поле. Это позволяет ротору двигаться в нужном направлении.
- Коммутация.Вместо механической коммутации, как в случае бесколлекторных двигателей постоянного тока, бесколлекторные двигатели используют электронику управления. Это качественным образом увеличивает эффективность и надежность работы мотора.
Такие моторы представляют собой эффективные и надежные устройства, которые используются в различных приложениях, включая электроинструменты, автомобильные системы, вентиляторы и многие другие.
Преимущества и недостатки бесколлекторного двигателя
Из особенностей бесколлекторных двигателей постоянного тока выделяют высокую эффективность, отсутствие износа щеток и коллектора, а также повышенную точность контроля вращения, относительно низкий уровень шума. Они широко используются в различных применениях, включая промышленные системы автоматизации, медицинские устройства, электронику для потребителей и многие другие области. Теперь рассмотрим их сильные и слабые стороны.
Преимущества
Такие двигатели обычно более эффективны, чем коллекторные двигатели постоянного тока, так как у них нет механических контактов и потерь при трении коллектора и щеток.
- Долговечность. Благодаря отсутствию коллектора и щеток, бесколлекторные двигатели имеют более долгий срок службы и меньшую вероятность отказа из-за износа деталей.
- Надежность.Из-за отсутствия щеточного узла у коллектора нет искрения и электромагнитных помех, что делает их более надежными в работе.
- Бесшумность. BLDC-моторы работают более тихо, что является весомым плюсом, особенно при монтаже в бытовых приборах, которые устанавливаются в частных домах и квартирах.
- Более высокая мощность и крутящий момент. Двигатели такого типа могут обеспечивать большую мощность и крутящий момент по сравнению с аналогичными DC-двигателями.
Недостатки
- Сложность управления. Моторы требуют сложной электроники для управления и синхронизации фаз статора, что может усложнить их применение, техническое и сервисное обслуживание.
- Высокая цена. Бесколлекторные двигатели обычно более дорогие по сравнению с обычными мотора вследствие более сложной конструкции и требования к электронике.
- Зависимость от электроники.Все BLDC-моторы требуют четкой совместной работы с управляющей электроникой (часто называемой инвертором), причем, если она выйдет из строя, весь двигатель может оказаться нерабочим.
- Сложность ремонта. В случае поломки бесколлекторного двигателя, его ремонт может быть более сложным и дорогостоящим по сравнению с DC-двигателем, где можно легко заменить щетки.
- Ограниченный диапазон скорости. BLDC-двигатели могут иметь ограниченный диапазон скорости по сравнению с некоторыми другими типами двигателей.
В целом, бесколлекторные двигатели постоянного тока являются высокоэффективными и надежными устройствами, однако их применение зависит от конкретных требований, а также ограничений конкретного приложения.
Принцип работы бесколлекторного двигателя постоянного тока
![]()
Понимание бесщеточного двигателя постоянного тока и щеточного двигателя постоянного тока : Вхождение в мир бесщеточного и щеточного двигателя постоянного тока
Эта статья проливает свет почти на все, что касается двигателей BLDC. Принцип работы, виды, преимущества и многое другое описано в этой статье. Поэтому давайте рассмотрим каждый из них подробнее.
ЧТО ТАКОЕ БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА?
Бесщеточный электродвигатель постоянного тока (BLDC) — это электродвигатель, приводимый в действие напряжением постоянного тока и имеющий электронную коммутацию вместо щеток, как в традиционных двигателях постоянного тока. Двигатели BLDC сегодня более популярны, чем традиционные двигатели постоянного тока, но разработка двигателей этого типа была невозможна до 1960-х годов, когда была разработана твердотельная электроника.

ПРИНЦИП РАБОТЫ БЕСЩЕТОЧНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Двигатель BLDC работает по принципу, схожему с принципом работы щеточного двигателя постоянного тока. Закон силы Лоренцше, который гласит, что всякий раз, когда проводник с током помещается в магнитное поле, он испытывает силу. В результате действия силы реакции магнит испытывает равную и противоположную силу. В Двигатель BLDC токоведущий проводник неподвижен, а постоянный магнит движется. Когда на катушки статора подается напряжение от источника, он становится электромагнитом и начинает создавать однородное поле в воздушном зазоре. Хотя источник питания является источником постоянного тока, при переключении образуется трапецеидальная форма напряжения переменного тока. Благодаря силе взаимодействия между статором электромагнита и ротором постоянного магнита, ротор продолжает вращаться. При переключении обмоток в виде сигнала высокого и низкого уровня на соответствующую обмотку подается напряжение, как на северный и южный полюса. Ротор постоянного магнита с северным и южным полюсами выравнивается с полюсами статора, заставляя двигатель вращаться.
ТИПЫ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Существуют различные типы бесщеточных двигателей постоянного тока. Они классифицируются в зависимости от конструкции, вида деталей, мощности сигнала и других критериев. Разные типы устройств предлагают различные преимущества и поэтому используются в различных приложениях. Здесь, , я подробно рассмотрю типы бесщеточных двигателей постоянного тока, используемых сегодня. Я также рассмотрю плюсы и минусы каждого типа на основе таких параметров, как крутящий момент, скорость и эффективность.

РАСПРОСТРАНЕННЫЕ ТИПЫ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Различные типы двигателей BLDC используются в различных условиях, таких как: B. в электрических промышленных машинах и в электронике. Бытовая техника, транспортные средства и роботизированные устройства.
ТИПЫ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА МОЖНО КЛАССИФИЦИРОВАТЬ СЛЕДУЮЩИМ ОБРАЗОМ.
- На основе дизайна
- Внутренний бесщеточный двигатель постоянного тока (также называемый внутренним ротором)
- Внешний бесщеточный двигатель постоянного тока (также называемый внешним ротором)
- На основе использования датчика
- Бесщеточный двигатель постоянного тока с датчиком
- Бесщеточный бессенсорный двигатель постоянного тока
- Основано на количестве полюсов
- Однополюсный бесщеточный двигатель постоянного тока
- Многополюсный бесщеточный двигатель постоянного тока
- Основано на сигнале мощности Тип
- Бесщеточный синусоидальный двигатель постоянного тока
- Трапецеидальный бесщеточный двигатель постоянного тока двигатель
На сайте типы двигателей BLDC объясняются следующим образом.
БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Этот тип двигателя BLDC имеет вращающуюся часть (ротор) в наборе электромагнитных катушек (статор). Такая конструкция бесщеточного двигателя постоянного тока обеспечивает отвод тепла путем проводимости, поскольку катушки статора установлены на корпусе двигателя. Встроенный бесщеточный двигатель постоянного тока легко достигает максимальной скорости и лучше всего подходит для приложений, требующих более высоких скоростных характеристик. В таких двигателях часто не используется много полюсов на роторе. Это снижает его производительность на низких скоростях.
БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Этот выходной двигатель BLDC по сути противоположен входному типу. Также называемый двигателем BL с внешним ротором, он использует внешний корпус, который вращается вокруг неподвижной внутренней части. Двигатели BLDC с внешним ротором обычно используют большее количество полюсов постоянного магнита на роторе. Это означает больший крутящий момент и более плавный ход. Основным недостатком бесщеточного двигателя постоянного тока out runner является его низкая скорость. В результате эти типы двигателей лучше подходят для применения в системах с высоким крутящим моментом и низкой скоростью.
СЕНСОРНЫЙ БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ДВИГАТЕЛЬ
Сенсорный бесщеточный двигатель постоянного тока полагается на датчики для получения данных о положении ротора. Эти типы двигателей BL обеспечивают надежную работу при более низких скоростях. На более низких скоростях датчики предоставляют точные данные для обеспечения плавного вращения. Основной недостаток двигателей с датчиками проявляется при более высоких скоростях , когда обратная связь с датчиком становится ненадежной. Неблагоприятные условия , такие как пыльная среда или высокие температуры, также влияют на датчики и, следовательно, на работу двигателя. Эти двигатели лучше подходят для применения на низких скоростях.
БЕССЕНСОРНЫЙ БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
В этом типе двигателя не используются датчики. Вместо этого контроллер полагается на обратную ЭДС, генерируемую в катушках статора, для расчета положения ротора. Эти разновидности бесщеточных двигателей постоянного тока обеспечивают наилучшую производительность на высоких скоростях.
Вы также можете использовать их в суровых условиях, поскольку в них не используются датчики. Его ошибка становится очевидной на низких скоростях, когда обратная ЭДС слишком мала для считывания контроллером или при запуске из установившегося состояния. Эти типы двигателей подходят для недорогих, высокоскоростных применений и жестких условий эксплуатации.
ОДНОПОЛЮСНЫЙ БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
В однополюсном двигателе используется ротор, состоящий из одной пары полюсов — северного и южного. Такая конструкция бесщеточного двигателя постоянного тока имеет свои преимущества и недостатки.
Начиная с мощности, двигатель может развивать очень высокие обороты. С другой стороны, на низких скоростях производительность униполярных двигателей значительно снижается, что влияет на стабильность и эффективность вращения. Поэтому их лучше всего использовать в высокоскоростных приложениях.
МНОГОПОЛЮСНЫЙ БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Многополюсные двигатели используют несколько полюсов на роторе, чаще всего до восьми. Как упоминалось выше, они размещаются противоположными полюсами друг к другу. Большее количество стержней обеспечивает более плавное вращение, но за счет скорости. В результате, эти типы двигателей BL не достигают высоких скоростей и в основном используются в низкоскоростных приложениях, где требуется высокий крутящий момент.
ДРУГИЕ ТИПЫ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА
Принято группировать бесщеточные двигатели постоянного тока по сигналам напряжения питания и обратной ЭДС. Двигатели этой категории рассматриваются ниже.
Трапецеидальный бесщеточный двигатель постоянного тока: Трапецеидальный BLDC-двигатель использует токовый сигнал, имеющий трапецеидальную форму. Это простой метод переключения по сравнению с синусоидальным типом. Метод заключается в подаче питания на одну пару клемм за один раз, оставляя третью клемму неподключенной. Недостатком этого сигнала, несмотря на его простоту, является вызываемый им эффект пульсации крутящего момента. Это делает работу двигателя менее плавной, особенно на низких скоростях. На более высоких скоростях эти двигатели работают лучше, чем синусоидальные типы, и подходят для приложений, где в основном используются высокие скорости.
Синусоидальный бесщеточный двигатель постоянного тока: Эти типы бесщеточных двигателей постоянного тока используют сигнал рабочего цикла, который формирует синусоидальную волну. При таком способе переключения контроллер пытается запитать все обмотки статора и использует ток, повторяющий плавную синусоиду. В результате устраняется эффект домино крутящего момента, характерный для трапецеидальных двигателей. Синусоидальный двигатель BLDC обеспечивает плавную работу, но в основном на низких скоростях. На высоких скоростях крутящий момент снижается. Поэтому они лучше подходят для ситуаций на низких скоростях.
ПРЕИМУЩЕСТВА БЕСЩЕТОЧНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
- Меньше общего обслуживания благодаря отсутствию щеток.
- Небольшой размер с гораздо лучшими тепловыми свойствами.
- Больший диапазон скоростей и меньший уровень электрического шума.
- Он не имеет механических переключателей или связанных с ними проблем.
- Высокая эффективность и высокое отношение мощности к размеру за счет использования ротора с постоянным магнитом.
- Высокая рабочая скорость даже в условиях нагрузки и разгрузки благодаря отсутствию ограничивающих скорость щеток.
- Меньшая геометрия двигателя и меньший вес по сравнению с щеточными двигателями постоянного тока и асинхронными двигателями переменного тока.
- Длительный срок службы, так как не требуется осмотр или обслуживание системы выключателей.
- Более высокая динамика благодаря низкой инерции и несущим обмоткам в статоре.
- Меньше электромагнитных помех.
- Низкий уровень шума благодаря отсутствию щеток.
БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА В СРАВНЕНИИ С. ЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Бесщеточный двигатель отличается от щеточного двигателя по ряду параметров, включая конструкцию, принцип работы и компоненты. Эти различия, в свою очередь, по-разному влияют на производительность и долговечность двигателя. Чтобы вы могли быстро понять различия, я разбил сравнения по упомянутым характеристикам и другим параметрам.
Конструкция: В бесщеточном двигателе используются электромагниты для статора и постоянные магниты для ротора. В щеточном двигателе все наоборот: вращающиеся катушки образуют ротор, а постоянный магнит — статор.
Метод коммутации: В щеточном двигателе используются щетки и механический коммутатор. Коммутатор бесщеточного двигателя постоянного тока является электронным и основан на твердотельной электронике. Крутящий момент при
различные уровни скорости. Щеточные двигатели испытывают небольшую потерю крутящего момента на более высоких скоростях.
Управление:Для работы двигателей BLDCтребуется электронное управление. Щеточным двигателям он не нужен, если только они не работают с переменной скоростью.
Уровень шума: Щеточные двигатели производят больше шума, чем двигатели BL, в основном из-за механического воздействия щеток на коммутатор. Шум бесщеточного двигателя постоянного тока всегда очень низкий, поскольку используется меньше механических частей.
Требования к техническому обслуживанию: По сравнению с щеточными типами, бесщеточные двигатели постоянного тока являются устройствами с низким уровнем технического обслуживания, поскольку в них не используются быстроизнашивающиеся детали, такие как щетки и коммутаторы.
Эффективность: Эффективность бесщеточного двигателя постоянного тока обычно намного выше, чем щеточного двигателя, до 85-90. Это объясняется отсутствием щеток, низкими потерями энергии и низким нагревом во время работы. КПД щеточных двигателей обычно составляет от 75% до 80%.
Датчики: Большинство бесщеточных двигателей используют датчики для определения положения ротора, а некоторые работают без датчиков. Щеточный двигатель не требует датчика.
Потребление энергии: Бесщеточные двигатели работают по сигналу рабочего цикла, что значительно снижает их энергопотребление. С другой стороны, щеточные двигатели поддерживают постоянный ток и не подходят для приложений, требующих экономии энергии, или там, где перегрев является проблемой.
Стоимость: Стоимость создания бесщеточного двигателя постоянного тока обычно высока по сравнению с традиционными щеточными типами. В основном это связано с включением дорогостоящих электронных схем управления, а иногда и датчиков.
Срок службы: Бесщеточные двигатели — это необслуживаемые устройства, которые служат долго. С другой стороны, щеточные двигатели содержат детали, которые требуют регулярного обслуживания и слишком быстро изнашиваются.
Подводя итоги сравнения бесщеточных и щеточных типов двигателей постоянного тока, ясно, что бесщеточные двигатели имеют больше преимуществ. В областях применения, где предпочтительнее использовать щеточные двигатели, их преимущества включают низкую стоимость и возможность работы в жестких условиях.
ВЕНТИЛЯТОР UNITED STAR’S BLDC MOTOR
Если вы собираетесь купить вентилятор с двигателем BLDC, вентилятор завода UnitedStar’s, тогда, будет вашим первым выбором 16 дюймов 12V BLDC настольный солнечный вентилятор для дома LED свет(USDC-418)!

Вентилятор Настольный солнечный вентилятор 16 дюймов 12V BLDC для дома LED Light — это отличный способ сохранить прохладу и комфорт в вашем доме в летние месяцы. Этот мощный и энергоэффективный вентилятор можно разместить на любом столе или поверхности в вашем доме, и он обеспечит освежающий бриз, который поможет сохранить прохладу и комфорт. Лопасти вентилятора изготовлены из долговечных и прочных материалов, а сам вентилятор заключен в элегантный и современный корпус. Вентилятор работает тихо и плавно, что делает его отличным дополнением к любому дому.
Солнечный вентилятор для дома доступен здесь для оптовой продажи. Как производитель настольных вентиляторов BLDC в Китае, мы прилагаем все усилия, чтобы быть надежным и хорошо вентилятор оптом, чтобы предложить производительность продукции и лучшее качество обслуживания клиентов с нашими клиентами.
В дополнение к солнечному вентилятору на нашем складе, мы также предлагаем услуги по изготовлению на заказ, не стесняйтесь обращаться к нам для любых пользовательских потребностей.
Бесколлекторный двигатель – устройство, принцип работы и управление
Бесколлекторные двигатели применяются в самых разных областях, так как это надежные, долговечные и стойкие к поломкам агрегаты. В быту чаще всего используется двигатель постоянного тока на 12 вольт, но бывают модели с большей мощностью.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей. Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе). Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
- С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.
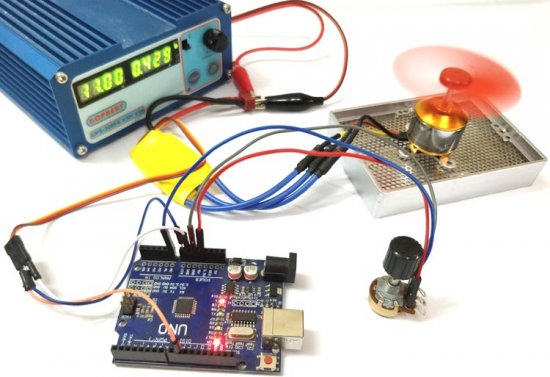
- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.