Способы регулирования частоты вращения двигателя постоянного тока.
Для получения высокой производительности и требуемой точности или шероховатости обработки изделий, остановки исполнительного органа производственной машины в нужном месте с заданной степенью точности и т. д. приходится принудительно изменять частоту вращения или скорость линейного перемещения исполнительного органа. Принудительное изменение частоты вращения или линейного перемещения исполнительного органа производственной машины в соответствии с требованием производственного процесса называется регулированием скорости.
В настоящее время взамен коробок скоростей, вариаторов и т. п. все больше применяется электрическое регулирование частоты вращения, в основе которого лежит использование искусственных, механических характеристик электродвигателей. Электрическое регулирование частоты вращения приводит к упрощению, облегчению и удешевлению механической части машин и механизмов, упрощению управления, возможности получения плавного регулирования частоты вращения в широком диапазоне.
При питании двигателей от источника постоянного напряжения (см. рис. 9.22) частоту вращения можно регулировать следующим образом: 1) изменением сопротивления цепи якоря; 2) изменением значения магнитного потока.
Естественно, что второй метод регулирования применим лишь к двигателям параллельного и смешанного возбуждения.
Для регулирования частоты вращения путем изменения сопротивления цепи якоря обычно используют тот же реостат, что и для пуска двигателя. Например, с помощью реостата, для которого на 9.27 изображены механические характеристики, при моменте М = Мс можно получить частоты вращения n4, n5 и n6. В том случае, когда необходимо иметь и другие частоты вращения, реостат снабжают дополнительными ступенями сопротивлений. Реостат, используемый как для пуска, так и для регулирования частоты вращения, находится в отношении нагревания в более тяжелых условиях, чем реостат, служащий только для пуска.
При изменении сопротивления в цепи якоря происходит следующее. Допустим, что двигатель параллельного, последовательного или смешанного возбуждения работает на естественной характеристике с моментом М = Мс и частотой вращения nс (см. рис. 9.27). В первое мгновение после включения в цепь якоря реостата с сопротивлением r = r1 + r2 + r3 из-за инерционности двигателя частота вращения не изменяется. Увеличение сопротивления при неизменной частоте вращения приводит к уменьшению тока якоря, а значит, и момента двигателя. При частоте вращения nс двигатель перейдет на характеристику 1 и будет развивать момент М3 . Так как М3 Мс, то начнется переходный процесс, при котором частота вращения двигателя будет снижаться. Это вызывает уменьшение ЭДС, а следовательно, увеличение тока якоря и момента двигателя. Установившийся режим наступает при частоте вращения n4, при которой М = Мс.
Рассматриваемый способ регулирования частоты вращения не требует сложного оборудования и дает возможность получить любую пониженную частоту вращения при заданной нагрузке. Однако он имеет и существенные недостатки. Одними из из них являются «мягкие» искусственные механические характеристики, благодаря чему частота вращения при данном сопротивлении сильно зависит от нагрузки двигателя. «Мягкие» характеристики затрудняют получение требуемых, особенно низких частот вращения при различных нагрузках. Другой недостаток заключается в том, что регулирование частоты вращения сопровождается потерями мощности в реостате, которые возрастают по мере увеличения сопротивления r и снижения частоты вращения.
Умножив правую и левую части уравнения (9.18) на ток якоря, получим уравнение баланса мощности цепи якоря
где UIя — мощность, потребляемая из сети; ЕIя — электромагнитная мощность, т. е мощность, преобразуемая электродвигателем из электрической в механическую; Iя 2 (rя + r) — потери мощности в сопротивлениях цепи якоря.
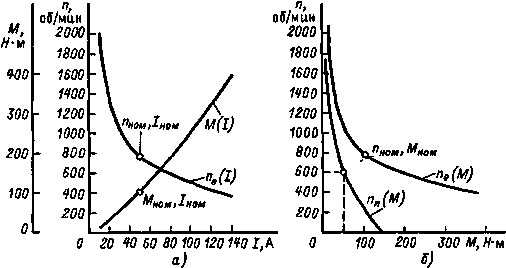
Рис. 9.28. Электромехани- ческая характе- ристика nе(I) и зависимость М(I) (а); механические характеристики n(М) двигателя последова тельного возбуждения к примерам 9.3 и 9.5 (б)
Так как при работе двигателя с М = Мс = const ток якоря не зависит от сопротивления в цепи якоря, то при увеличении последнего мощность UIя остается постоянной. Происходит лишь ее перераспределение: с увеличением сопротивления rи снижением частоты вращения электромагнитная мощность уменьшается, а потери мощности возрастают. При n→ 0 ЕIя→ 0, а I 2 (rя + r) → UIя. Значительные потери мощности в цепи якоря приводят к снижению КПД установки.
Пример 9.3. Двигатель последовательного возбуждения имеет следующие технические данные: Uном = 220 В, Рном = 8,5 кВт, nном = 770 об/мин, Iном = 50 А. Сопротивление якоря rя = 0,75 Ом. Естественная электромеханическая характеристика nе(I) и зависимость М(I) даны на рис. 9.28,а.
Построить естественную механическую характеристику nе(М). Определить сопротивление резистора r, который необходимо включить в цепь якоря, чтобы при моменте М = 50 Н • м получить частоту вращения n = 600 об/мин. Построить искусственную механическую характеристику nи(М), соответствующую сопротивлению r.
По заданному моменту М = 50 Н • м с помощью кривой М(I) находим ток I = 29 А = Iя, после чего по характеристике nе(I) определяем частоту вращения nе = 1050 об/мин. Из формулы (9.24), подставив в нее nи = 600 об/мин, Iя = 29 А и nе = 1050 об/мин, определяем, что сопротивление r= 2,8 Ом.
Расчет искусственной механической характеристики производят в следующем порядке. Задаются моменты, например М = 100 Н • м, по кривой М(I) определяют ток I = 48 А = Iя ; пользуясь характеристикой nе(I), по току I = 48 А находят nе = 780 об/мин. По формуле (9.24) определяют частоту вращения nи = 212 об/мин.
Искусственная механическая характеристика nи(М) приведена на рис. 9.28, б Для регулирования частоты вращения двигателей параллельного и смешанного возбуждения путем изменения магнитного потока в цепь шунтовой обмотки включают реостат rр (см. рис. 9.22). Изменение сопротивления последнего приводит к изменению тока Iв и, следовательно, магнитного потока. При регулировании частоты вращения указанным методом резистор r из цепи якоря обычно выключают.
Рассмотрим более подробно данный метод применительно к двигателю параллельного возбуждения. Зависимость между частотой вращения и магнитным потоком при М = const определяется уравнением (9.21).
Чтобы можно было составить представление о характере изменения частоты вращения, на рис. 9.29 приведены зависимости n(Ф).
Как видно, при работе двигателя вхолостую (M1 = Mcl = 0) с уменьшением магнитного потока частота вращения возрастает и при Ф → 0 n → ∞. Если же двигатель нагружен (М = Мс ≠ 0), то при уменьшении магнитного потока частота вращения сначала возрастает, а затем, достигнув максимального значения, уменьшается. Одна и та же частота вращения в случае М = Мс ≠ 0 может быть получена при двух различных значениях магнитного потока. Однако рабочей областью, в которой обычно производится регулирование частоты вращения, является область, соответствующая большим магнитным потокам, где с уменьшением потока частота вращения возрастает.
На основании выражения М = kMФIя можно также сделать важный вывод о том, что при М =Мс = const и уменьшении магнитного потока ток Iя возрастет. Это необходимо учитывать при выборе мощности двигателя.
Из уравнения (9.21) следует, что механические характеристики двигателя параллельного возбуждения n(М) при различных значениях магнитного потока прямолинейны; меньшим значениям магнитных потоков соответствуют большие частоты вращения и более «мягкие» механические характеристики (рис. 9.30). Например, установив потоки Ф1, Ф2 и Ф3, получим при моменте сопротивления Мс частоты вращения п1, п2 и п3.
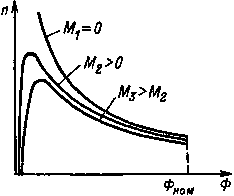
Рис. 9.29. Зависимости n(Ф) двигателя параллельного возбуждения при различных моментах
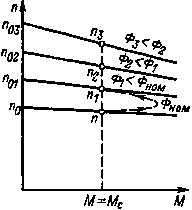
Рис. 9.30. Механические характеристики двигателя параллельного возбуждения при различных магнитных потоках
Переход от одной механической характеристики к другой происходит не при постоянной частоте вращения, а в соответствии с так называемой динамической характеристикой n(М), показанной на рис. 9.30 пунктиром. Это объясняется значительной индуктивностью обмотки возбуждения, из-за которой изменение магнитного потока происходит не мгновенно, а постепенно, одновременно с увеличением частоты вращения.
Одним из достоинств рассмотренного способа регулирования частоты вращения является его экономичность, так как дополнительные потери мощности в регулировочном реостате rр невелики. К достоинствам следует отнести также достаточно «жесткие» механические характеристики, что облегчает получение нужных частот вращения при различных нагрузках.
Серьезным недостатком следует считать то, что регулирование частоты вращения путем изменения магнитного потока можно производить лишь в области вверх от естественной механической характеристики.
Пример 9.4. Определить, во сколько раз необходимо уменьшить магнитный поток двигателя примера 9.1, чтобы при моменте М = 45 Н • м получить частоту вращения nи = 1600 об/мин. Установить, не будет ли перегреваться двигатель при длительной работе с ослабленным потоком. Построить искусственную механическую характеристику, соответствующую ослабленному потоку.
Р е ш е н и е. Заменив в (9.21) kM через kе /0,105 и учитывая, что магнитный поток и частота вращения соответствуют искусственной механической характеристике, найдем
Электрические машины — Регулирование частоты вращения
6.7.3. Регулирование частоты вращения двигателей постоянного тока
Согласно (6.8), регулирование частоты вращения двигателей постоянного тока можно осуществлять путем изменения потока Ф, введения дополнительного сопротивления в цепь якоря и изменения напряжения сети . В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата в цепи возбуждения. При увеличении сопротивления поток Ф уменьшается и частота вращения растет. На рис. 6.43 представлены механические характеристики двигателя параллельного возбуждения при трех значениях потока. Таким способом регулируют частоту вращения в пределах , . Верхний уровень частот ограничивается условиями коммутации. Кроме того, при глубоком уменьшении потока возбуждения усиливается размагничивающее действие реакции якоря, жесткость механической характеристики растет, и падающая характеристика при номинальном потоке может стать возрастающей при ослабленном потоке, что приведет к нарушению устойчивой работы двигателя.
Регулирование частоты вращения двигателя путем введения в цепь якоря дополнительного сопротивления позволяет изменять частоту вращения вниз от номинальной в широких пределах (рис. 6.44). Но этот способ не экономичен. Полезная мощность двигателя при постоянном моменте пропорциональна частоте вращения (без учета потерь в якоре):
,
а потребляемая из сети мощность от частоты вращения не зависит,
.
Поэтому КПД двигателя пропорционален частоте вращения якоря,
.
Кроме того, при введении дополнительного сопротивления жесткость механической характеристики двигателя снижается, что может привести к ухудшению работы приводного механизма.
Более совершенным способом регулирования частоты вращения вниз является регулирование путем изменения подводимого к двигателю напряжения. На рис. 6.45 представлены механические характеристики двигателя параллельного возбуждения для трех значений напряжений. Жесткость механических характеристик практически не меняется, поэтому таким способом можно регулировать частоту вращения от номинальной до нуля.
Этот способ по существу сходен с частотным регулированием угловой скорости в машинах переменного тока, так как закон изменения напряжения и частоты тока в якоре близок к при постоянном потоке Ф:
.
В качестве источников регулируемого напряжения используются генератор постоянного тока (рис. 6.41, а) либо полупроводниковый выпрямитель (рис. 6.41, б). Схема с полупроводниковым выпрямителем обладает более высоким быстродействием по сравнению со схемой генератор-двигатель, но уступает по перегрузочной способности. Кроме того, работа полупроводникового преобразователя ухудшает качество электрической энергии сети переменного тока из-за генерации высших гармоник напряжения и тока.
Рассмотренные способы регулирования частоты вращения двигателей параллельного возбуждения применяются и в двигателях смешанного возбуждения.
Регулирование частоты вращения двигателей последовательного возбуждения осуществляется путем изменения тока в последовательной обмотке или напряжения якоря U с помощью шунтирующих реостатов (рис. 6.46).
При шунтировании обмотки возбуждения ток уменьшается и частота вращения якоря растет, а при шунтировании якоря напряжение якоря уменьшается, поэтому частота вращения падает (рис. 6.47).
Регулирование частоты вращения вверх осуществляется практически при постоянном КПД
.
Верхний уровень частоты вращения ограничивается условиями коммутации.
Регулирование частоты вращения вниз может осуществляться вплоть до нуля, однако КПД этого способа снижается пропорционально напряжению якоря и частоте вращения:
,
где — частота вращения якоря при .
Таким образом, этот способ регулирования так же, как и реостатный способ регулирования частоты вращения двигателя с параллельным возбуждением, является неэкономичным. Он используется лишь в случае двигателей малой мощности.
Регулирование частоты вращения двигателей с параллельным возбуждением

Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Первый способ применяют редко, так как он неэкономичен, дает возможность вести регулирование частоты вращения только под нагрузкой и вынуждает использовать механические характеристики, имеющие различный наклон. При регулировании по этому способу вращающий предельно допустимый момент остается постоянным. Магнитный поток не меняется, и если приближенно считать, что сила тока, определяемая длительно допустимым нагревом двигателя, одинакова на всех частотах вращения, то предельно допустимый момент также должен быть одинаков на всех скоростях.
Регулирование скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока получило значительное распространение. Величину потока можно изменять реостатом. При увеличении сопротивления этого реостата уменьшается сила тока возбуждения и магнитный поток и увеличивается частота вращения. Каждому уменьшенному значению магнитного потока Ф соответствуют увеличенные значения n0 и b.
Таким образом, при ослаблении магнитного потока механические характеристики представляют собой прямые линии, расположенные выше естественной характеристики, непараллельные ей и имеющие тем больший наклон, чем меньшим потокам они соответствуют. Число их зависит от числа контактов на реостате и может быть достаточно большим. Таким образом, регулирование частоты вращения ослаблением потока может быть сделано практически бесступенчатым.

Если по-прежнему приближенно считать предельно допустимую силу тока на всех скоростях одинаковой, то P = const
Таким образом, при регулировании частоты вращения изменением магнитного потока предельно допустимая мощность двигателя остается постоянной при всех скоростях. Предельно допустимый момент изменяется обратно пропорционально частоте вращения. При повышении частоты вращения двигателя ослаблением поля увеличивается искрение под щетками вследствие роста реактивной э. д. с, наводимой в коммутируемых секциях двигателя.
При работе двигателя с ослабленным потоком уменьшается устойчивость работы, особенно когда нагрузка на валу двигателя является переменной. При малом значении потока заметно размагничивающее действие реакции якоря. Так как размагничивающее действие определяется величиной силы тока якоря электродвигателя, то при изменениях нагрузки частота вращения двигателя резко меняется. Для повышения устойчивости работы регулируемые двигатели с параллельным возбуждением обычно снабжают слабой последовательной обмоткой возбуждения, поток которой частично компенсирует размагничивающее действие реакции якоря.
Двигатели, предназначенные для работы с повышенными частотами вращения, должны обладать повышенной механической прочностью. При высоких скоростях усиливаются вибрации двигателя и шум при работе. Эти причины ограничивают наибольшую частоту вращения электродвигателя. Низшая частота вращения также имеет определенный практический предел.
Номинальный момент определяет размеры и стоимость двигателей постоянного тока (так же как и асинхронных двигателей). При понижении наименьшей, в данном случае номинальной, частоты вращения двигателя определенной мощности номинальный момент его возрастет. Размеры двигателя при этом увеличатся.
На промышленных предприятиях наиболее часто применяют двигатели с диапазонами регулирования

Для расширения диапазона регулирования частоты вращения изменением магнитного потока иногда употребляют особую схему возбуждения двигателя, позволяющую улучшить коммутацию и снизить влияние реакции якоря на высоких частотах вращения двигателя. Питание катушек двух пар полюсов разделяют, образуя две независимые цепи: цепь катушек одной пары полюсов и цепь другой пары.
Одну из цепей включают на постоянное напряжение, в другой изменяют величину и направление тока. При таком включении общий магнитный поток, взаимодействующий с якорем, можно изменять от суммы наибольших значений потоков катушек двух цепей до их разности.
Катушки включены так, что через одну пару полюсов всегда проходит полный магнитный поток. Поэтому реакция якоря сказывается в меньшей степени, чем при ослаблении магнитного потока всех полюсов. Так можно регулировать все многополюсные двигатели постоянного тока с волновой обмоткой якоря. При этом достигается устойчивая работа двигателя в значительном диапазоне скоростей.
Регулирование частоты вращения двигателей постоянного тока посредством изменения подводимого напряжения требует применения специальных схем.
Двигатели постоянного тока по сравнению с асинхронными значительно тяжелее и в несколько раз дороже. К. п. д. этих двигателей ниже, а эксплуатация их более сложна.
Промышленные предприятия получают энергию трехфазного тока, и для получения постоянного тока требуются специальные преобразователи. Это связано с добавочными потерями энергии. Основной причиной применения для привода металлорежущих станков двигателей постоянного тока с параллельным возбуждением является возможность практически бесступенчатого и экономичного регулирования их частоты вращения.
В станкостроении применяют комплектные приводы с выпрямителями и двигателем постоянного тока с параллельным возбуждением (рис. 1). Посредством реостата PC изменяют силу тока возбуждения электродвигателя, обеспечивая практически бесступенчатое регулирование его частоты вращения в диапазоне 2:1. В комплект привода входит пусковой реостат РП, а также аппаратура защиты, на рис. 1 не показанная.
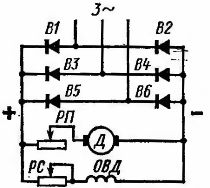
Рис. 1. Схема электропривода постоянного тока с выпрямителем
В ыпрямители (B1 — В6), погруженные в трансформаторное масло, и всю аппаратуру помещают в шкафу управления, а реостат PC устанавливают в месте, удобном для обслуживания.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Ранее на эту тему: Электропривод
Регулирование частоты вращения двигателя постоянного тока независимого возбуждения ДПТ НВ
Способы регулирования частоты вращения двигателей оцениваются следующими показателями: плавностью регулирования; диапазоном регулирования, определяемым отношением наибольшей частоты вращения к наименьшей; экономичностью регулирования, определяемой стоимостью регулирующей аппаратуры и потерями электроэнергии в ней.
Из (29.5) следует, что регулировать частоту вращения двигателя независимого возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря.
Регулирование частоты вращения ДПТ НВ введение дополнительного сопротивления в цепь якоря
Дополнительное сопротивление (реостат rд) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока.
При включении сопротивления rд в цепь якоря выражение частоты (29.5) принимает вид
где — частота вращения в режиме х.х.;
— изменение частоты вращения, вызванное падением напряжения в цепи якоря.
С увеличением rд возрастает , что ведет к уменьшению частоты вращения. Зависимость n = f(rд) иллюстрируется также и механическими характеристиками двигателя независимого возбуждения (рис. 29.4, а): с повышением rд увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу (M = Mном ) уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате (I 2 a *rД), которые интенсивно растут с увеличением мощности двигателя.

Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а — при введении в цепь якоря добавочного сопротивления;
б — при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Регулирование частоты вращения ДПТ НВ изменением основного магнитного потока
Этот способ регулирования в двигателе независимого возбуждения реализуется посредством реостата rрег в цепи обмотки возбуждения. Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения [см. (29.5)]. При увеличении rрег частота вращения растет. Зависимость частоты вращения от тока возбуждения выражается регулировочной характеристикой двигателя n=f(IВ) при и .
Из выражения (29.5) следует, что с уменьшением магнитного потока Ф частота вращения n увеличивается по гиперболическому закону (рис. 29.5,а). Но одновременно уменьшение Ф ведет к росту тока якоря Ia = M/(Cм*Ф). При потоке ток якоря достигает значения , т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю . В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения nmax во много раз превосходит номинальную частоту вращения двигателя nном и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата rрег необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П допускается превышение частоты вращения над номинальной не более чем в 2—3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма Фост, при котором частота вращения может достигнуть опасного значения.

Вид регулировочных характеристик n = f(Ф) зависит от значения нагрузочного момента M2 на валу двигателя: с ростом M2 максимальная частота вращения nmax уменьшается (рис. 29.5, б).
Рис. 29.5. Регулировочные характеристики двигателя независимого возбуждения
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях независимого возбуждения ток IВ = (0,01 — 0,07)I а , а поэтому потери в регулировочном реостате невелики.
Однако диапазон регулирования обычно составляет nMAX/nMIN = 2 — 5. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня.
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при IB = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n0 пропорциональна напряжению, а от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г и двигателя Д используется возбудитель В — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6, б) известна под названием системы «генератор — двигатель» (Г—Д).

Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г—Д, осуществляется изменением направления тока в цепи возбуждения генератора Г переключателем П, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховик М, который запасает энергию в период уменьшения нагрузки на двигатель Д и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазоне nMAX/nMIN ≥ 25 . Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
Импульсное регулирование частоты вращения ДПТ НВ
Сущность этого способа регулирования иллюстрируется схемой, изображенной на рис. 29.7, а. Цепь обмотки якоря двигателя параллельного (независимого) возбуждения периодически прерывается ключом К. Во время замыкания цепи якоря на время t к обмотке якоря подводится напряжение U = Uимпи ток в ней достигает значения Iamax. Затем ключом К цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения Iamin (при размыкании ключа К ток в обмотке якоря замыкается через диод VD). При следующем замыкании ключа К ток достигает значения Iamax и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение
где Т— отрезок времени между двумя следующими друг за другом импульсами напряжения (рис. 29.7, б); — коэффициент управления.
При этом в обмотке якоря проходит ток, среднее значение которого .
При импульсном регулировании частота вращения двигателя
Таким образом, импульсное регулирование частоты вращения аналогично регулированию изменением подводимого к цепи якоря напряжения. С целью уменьшения пульсаций тока в цепи якоря включена катушка индуктивности (дроссель) , а частота подачи импульсов равна 200—400 Гц.

На рис. 29.7, в представлена одна из возможных схем импульсного регулирования, где в качестве ключа применен управляемый диод — тиристор VS. Открывается тиристор подачей кратковременного импульса от генератора импульсов (ГИ) на управляющий электрод (УЭ) тиристора. Цепь L1C, шунтирующая тиристор, служит для запирания последнего в период между двумя управляющими импульсами. Происходит это следующим образом: при открывании тиристора конденсатор С перезаряжается через контур L1C и создает на силовых электродах тиристора напряжение, обратное напряжению сети, которое прекращает протекание тока через тиристор. Параметрами цепи L1C определяется время (с) открытого состояния тиристора: . Здесь L1 выражается в генри (Гн); С — в фарадах (Ф).
Рис. 29.7. Импульсное регулирование частоты вращения двигателя постоянного тока
Значение среднего напряжения Uср регулируется изменением частоты следования управляющих импульсов от генератора импульсов на тиристор VS.
Жесткие механические характеристики и возможность плавного регулирования частоты вращения в широком диапазоне определили области применения двигателей независимого возбуждения в станочных приводах, вентиляторах, а также во многих других случаях регулируемого электропривода, где требуется устойчивая работа при колебаниях нагрузки.